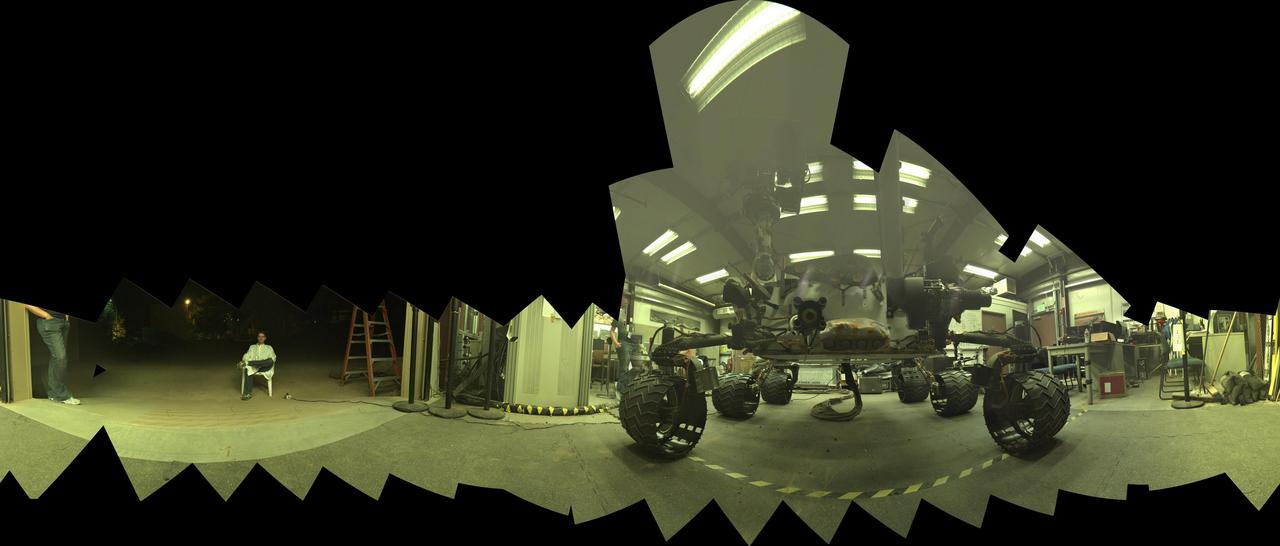
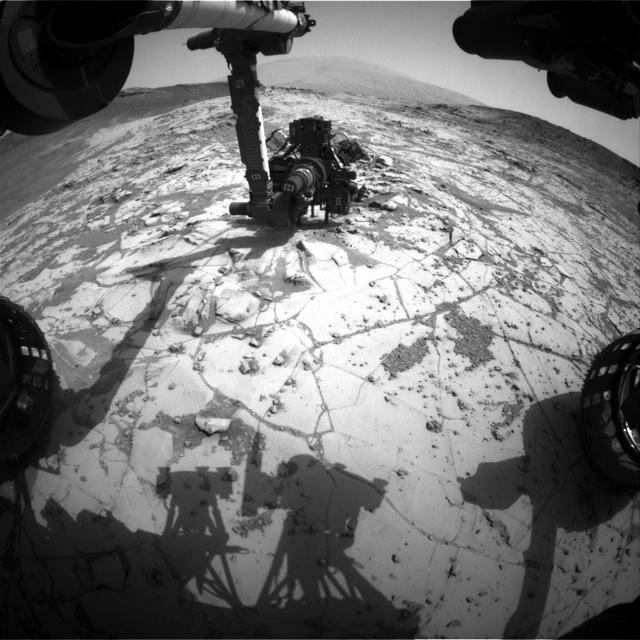
This view of a test rover at NASA's Jet Propulsion Laboratory, Pasadena, California, results from advance testing of arm positions and camera pointings for taking a low-angle self-portrait of NASA's Curiosity Mars rover. This rehearsal in California led to a dramatic Aug. 5, 2015, selfie of Curiosity, online at PIA19807. Curiosity's arm-mounted Mars Hand Lens Imager (MAHLI) camera took 92 of component images that were assembled into that mosaic. The rover team positioned the camera lower in relation to the rover body than for any previous full self-portrait of Curiosity. This practice version was taken at JPL's Mars Yard in July 2013, using the Vehicle System Test Bed (VSTB) rover, which has a test copy of MAHLI on its robotic arm. MAHLI was built by Malin Space Science Systems, San Diego. JPL, a division of the California Institute of Technology in Pasadena, manages the Mars Science Laboratory Project for the NASA Science Mission Directorate, Washington. JPL designed and built the project's Curiosity rover. http://photojournal.jpl.nasa.gov/catalog/PIA19810

Tests of possible maneuvers for use by NASA rover Spirit on Mars include use of this lightweight test rover at the Jet Propulsion Laboratory, Pasadena, Calif.

Rover team members Kim Lichtenberg and Joseph Carsten watch motions of a test rover at NASA Jet Propulsion Laboratory, Pasadena, Calif., as the rover carries out commands for driving forward with an arc toward the right.

After commanding five of a test rover six wheels to drive forward, rover driver Paolo Bellutta left measures how much the rover moved sideways, downslope, during the maneuver.

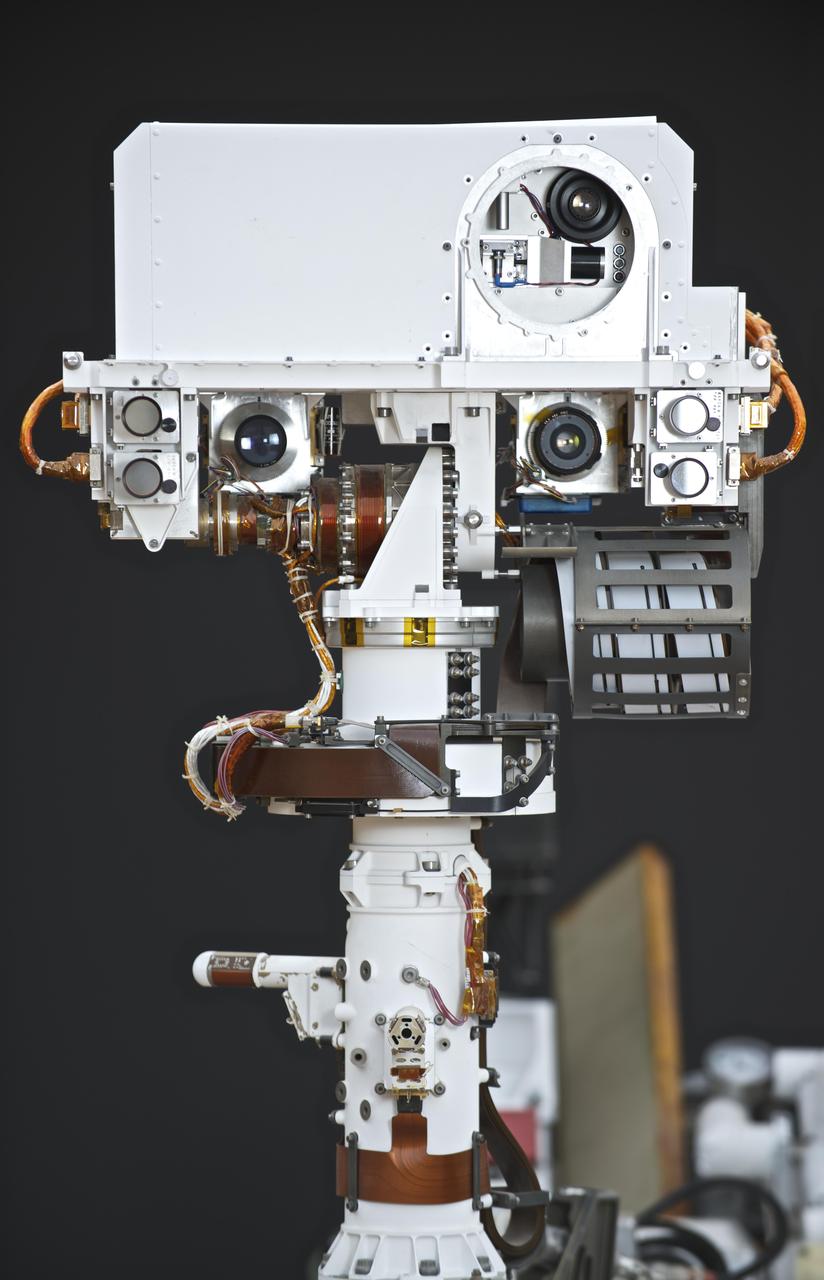
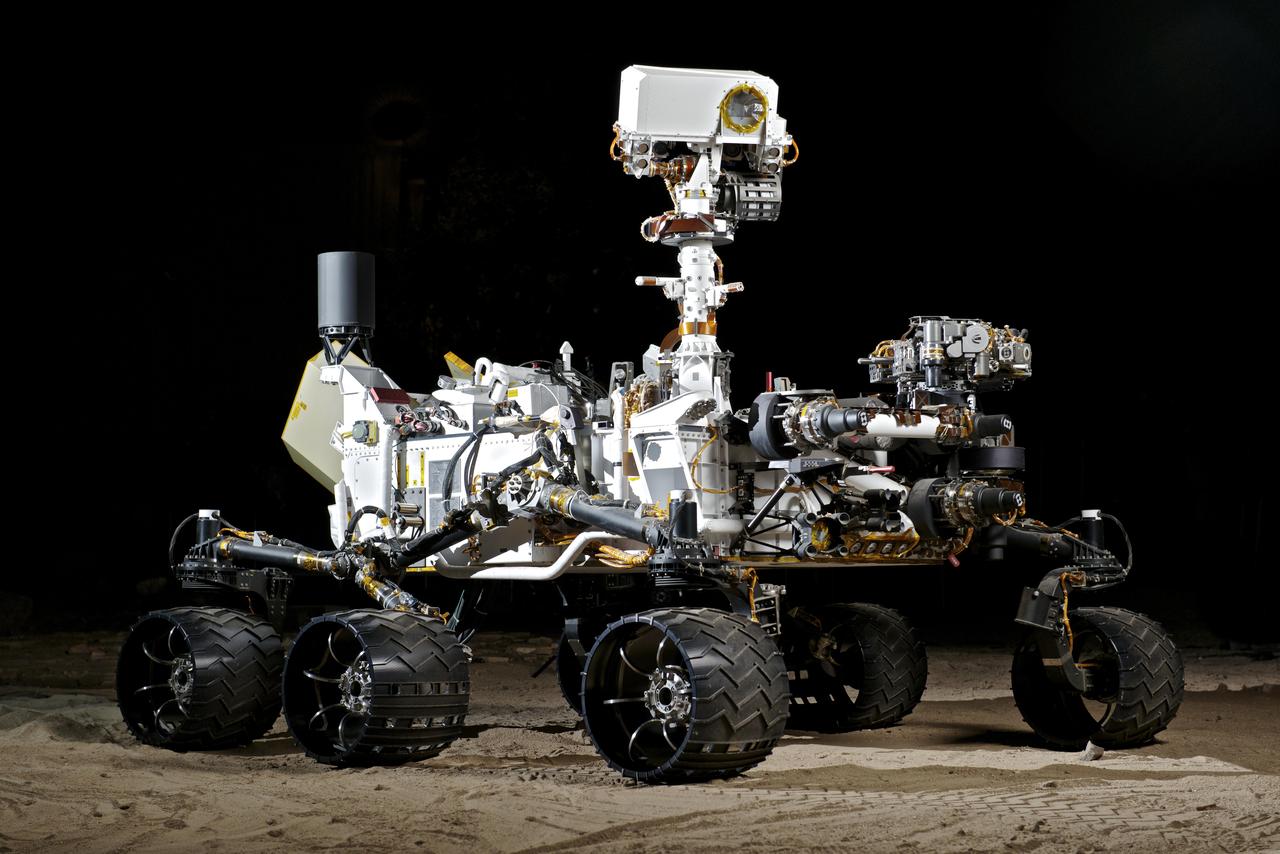
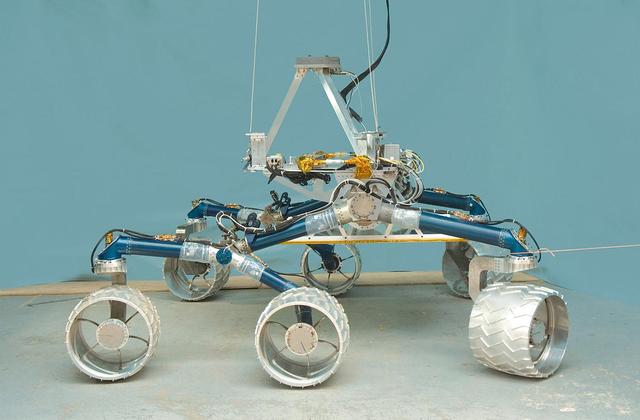
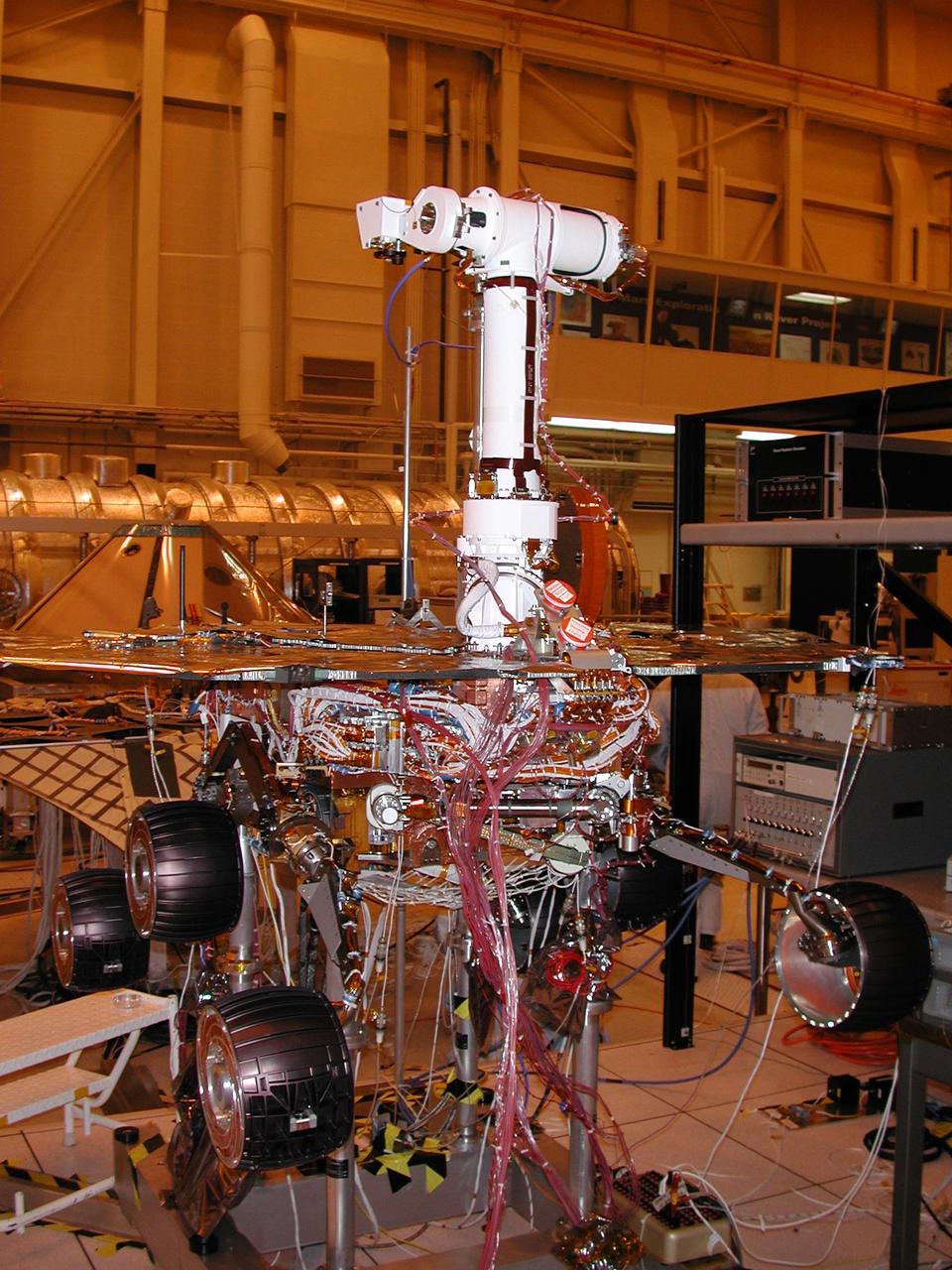
This photograph shows the Vehicle System Test Bed VSTB rover, a nearly identical copy to NASA Curiosity rover on Mars.
This photograph shows the Vehicle System Test Bed VSTB rover, a nearly identical copy to NASA Curiosity rover on Mars.

This photograph shows the Vehicle System Test Bed VSTB rover, a nearly identical copy to NASA Curiosity rover on Mars.
This photograph shows the Vehicle System Test Bed VSTB rover, a nearly identical copy to NASA Curiosity rover on Mars.

NASA Rover 2 is driven over staggered ramps to test the suspension range of motion.
In this view from behind a test rover at NASA Jet Propulsion Laboratory, Pasadena, Calif., the rear wheels of the rover are turned toward the left, and the left-front wheel is turned toward the the right.

NASA Mars Science Laboratory mission team members ran mobility tests on the test rover called Scarecrow on sand dunes near Death Valley, Ca. in early May 2012 in preparation for operating the Curiosity rover, currently en route to Mars.
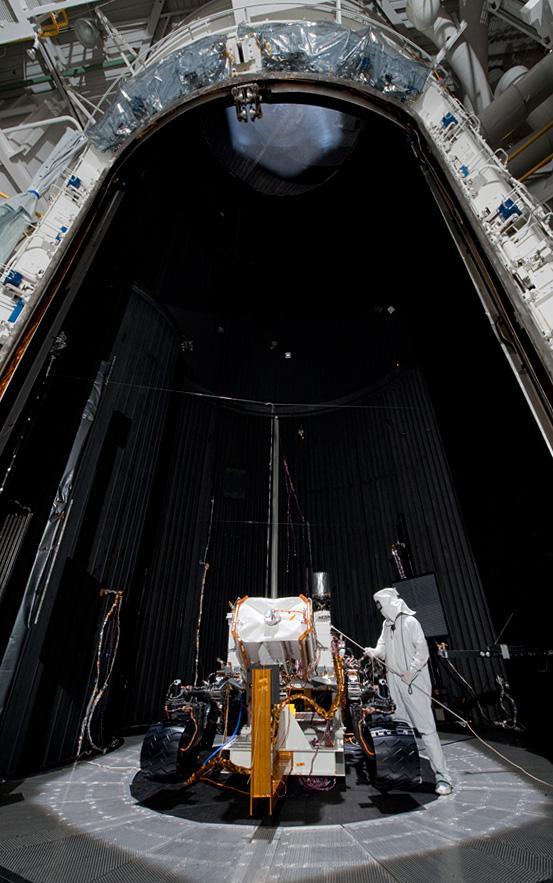
This image shows preparation for March 2011 testing of the Mars Science Laboratory rover, Curiosity, in a space-simulation chamber; the rover will go through operational sequences in environmental conditions similar to what it will experience on Mars.

A test setup at NASA Jet Propulsion Laboratory enables experiments with maneuvers being considered for use by NASA Mars Exploration Rover Spirit to get Spirit out of soft soil where it has become embedded.

In a special chamber at NASA's Jet Propulsion Laboratory, engineers prepare to test a small rover that will go to the Moon as part of a NASA technology demonstration called CADRE (Cooperative Autonomous Distributed Robotic Exploration). The project is designed to show that a group of robotic spacecraft can work together as a team to accomplish tasks and record data autonomously – without explicit commands from mission controllers on Earth. This electromagnetic interference and compatibility testing took place in November 2023 in a chamber designed to absorb radio waves. Such testing is intended to confirm that the operation of the electronic subsystems do not interfere with each other nor with those on the lander, and that the rover can survive expected electromagnetic disturbances. Justin Schachter, left, and Manny Soriano are shown. https://photojournal.jpl.nasa.gov/catalog/PIA26166
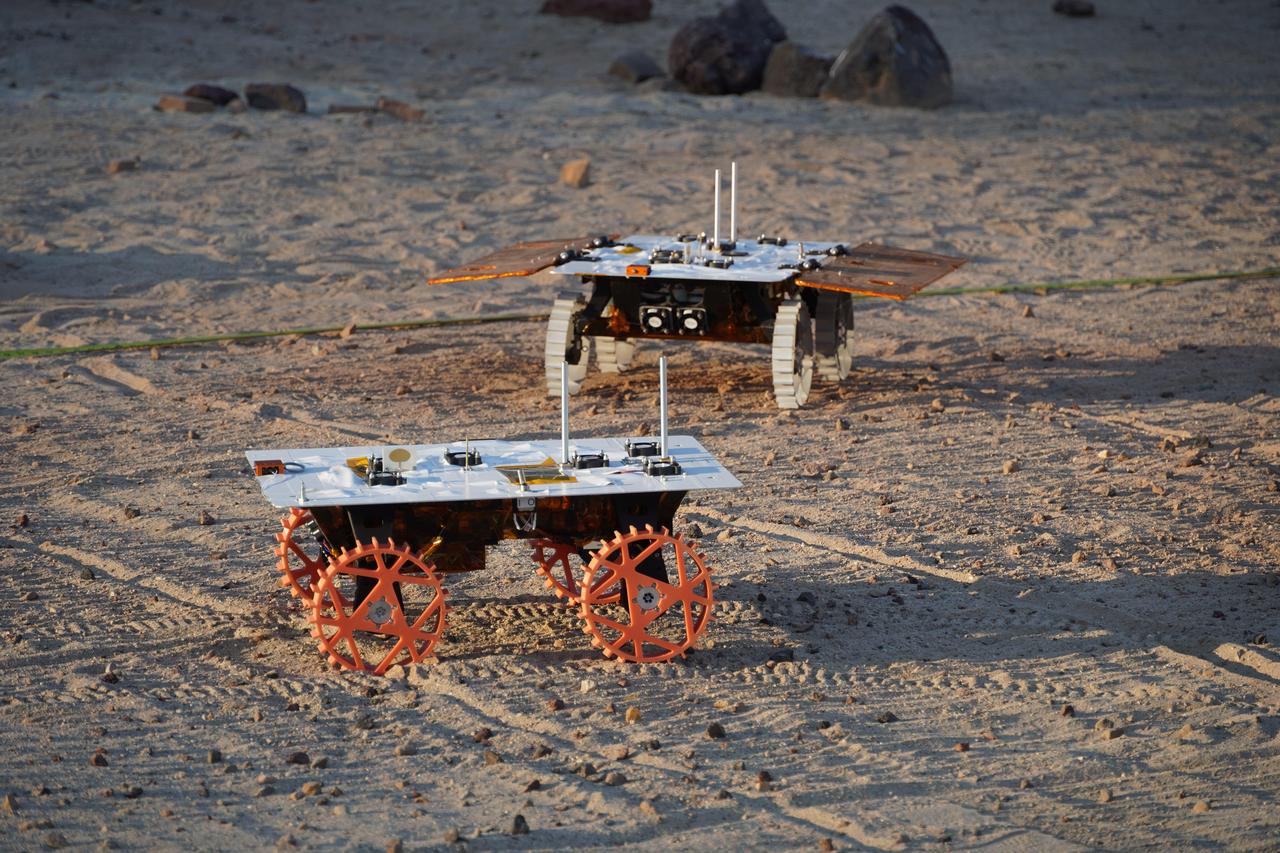
Two full-scale development model rovers that are part of NASA's CADRE (Cooperative Autonomous Distributed Robotic Exploration) technology demonstration drive in the Mars Yard at the agency's Jet Propulsion Laboratory in Southern California in August 2023. The project is designed to show that a group of robotic spacecraft can work together as a team to accomplish tasks and record data autonomously – without explicit commands from mission controllers on Earth. The rovers being tested here are similar in size and appearance to the flight models – still being built at the time of this image – that will travel to the Moon. Equipped with flight software and autonomy capabilities, these development models were used for drive tests outside the clean room. In this image, one rover is fitted with a stand-in for solar panels, while the other rover is not. A series of Mars Yard tests with the development models confirmed CADRE hardware and software can work together to accomplish key goals for the project. The rovers drove together in formation. Faced with unexpected obstacles in the way, they adjusted their plans as a group by sharing updated maps and replanning coordinated paths. And when one rover was low on battery charge, the whole team paused so they could later continue together. Several drives were performed at night under large flood lamps so the rovers could experience extreme shadows and lighting that approximate what they'll encounter during the lunar daytime. https://photojournal.jpl.nasa.gov/catalog/PIA26168

While a test rover rolls off a plywood surface into a prepared bed of soft soil, rover team members Colette Lohr left and Kim Lichtenberg center eye the wheels digging into the soil and Paolo Bellutta enters the next driving command.

Rover team members at NASA Jet Propulsion Laboratory, Pasadena, Calif., on July 24, 2009, discuss the next step in preparing for a new phase in testing of possible moves for getting NASA Mars rover Spirit out of a sandtrap on Mars.

Michael Malin, left, principal investigator for three science cameras on NASA Curiosity Mars rover, comments to a news reporter during tests with Curiosity mobility-test stand-in, Scarecrow, on Dumont Dunes in California Mojave Desert.
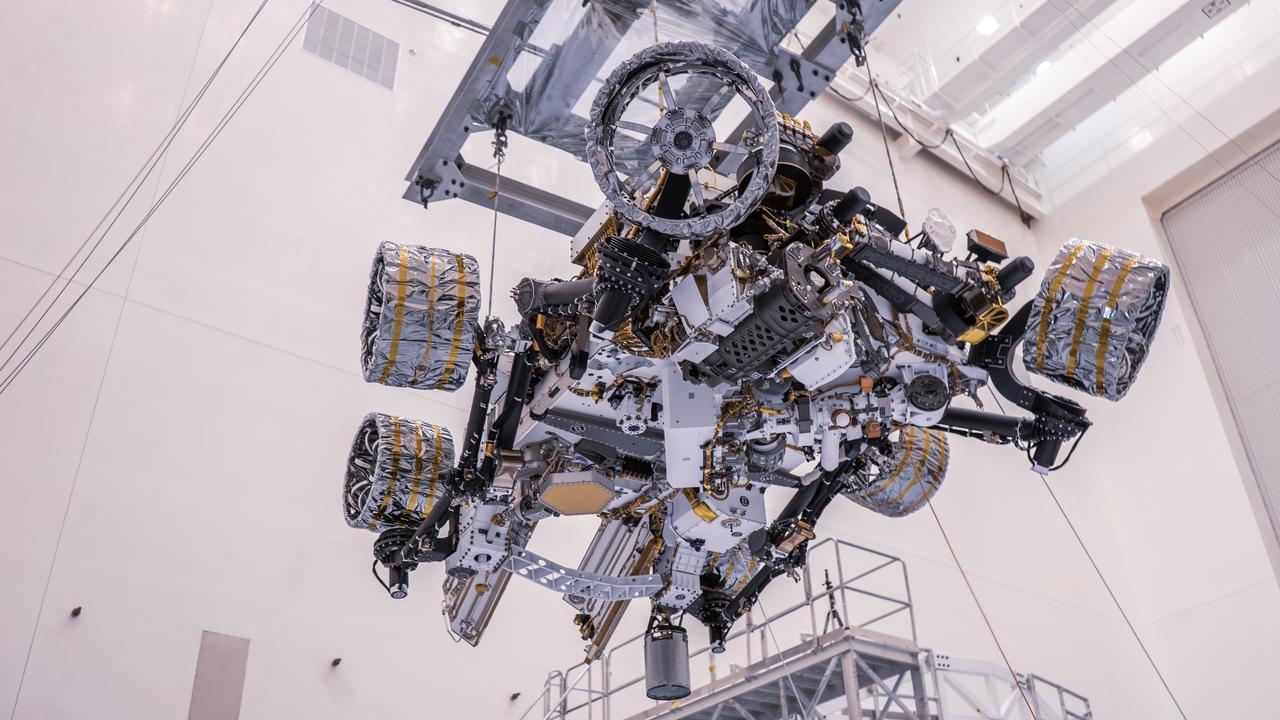
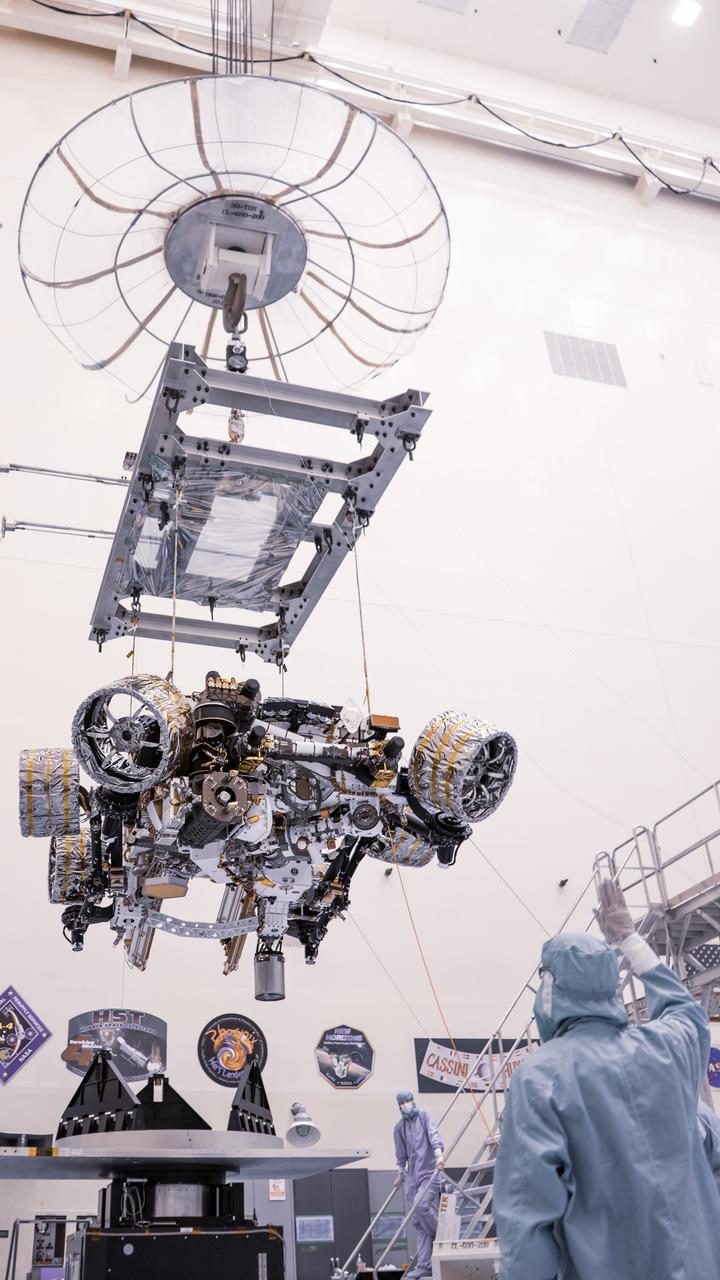
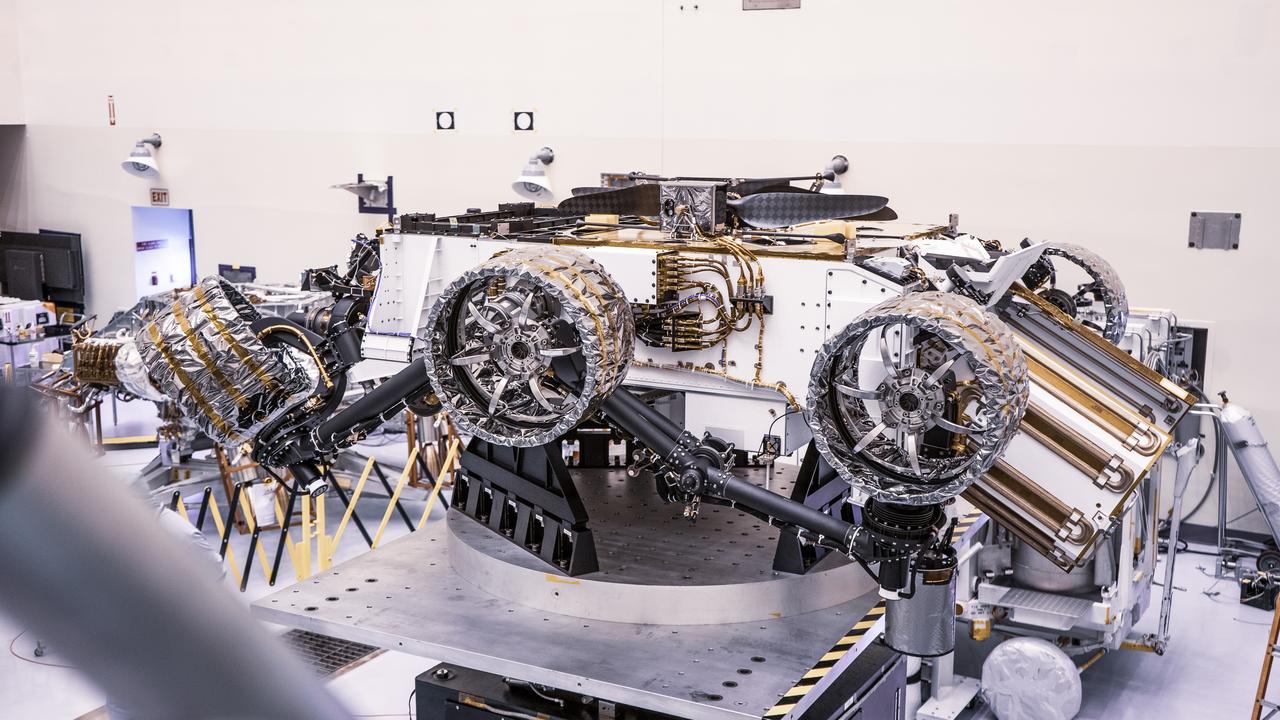
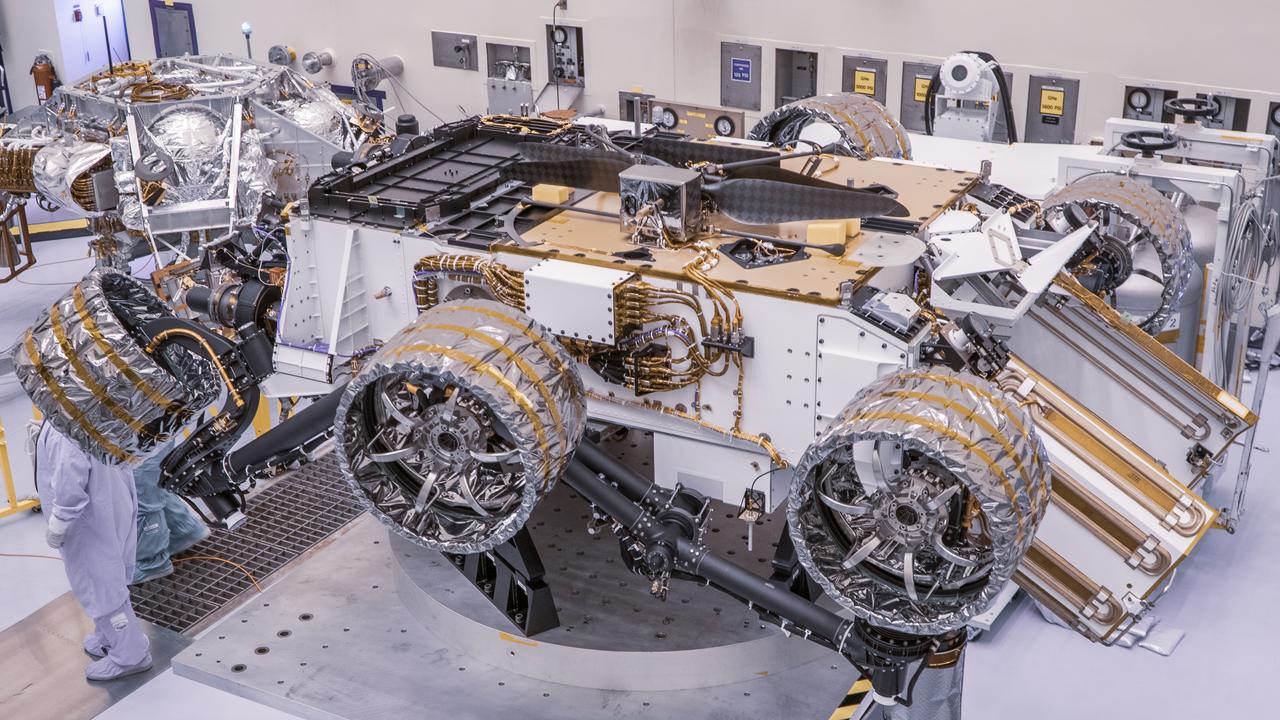
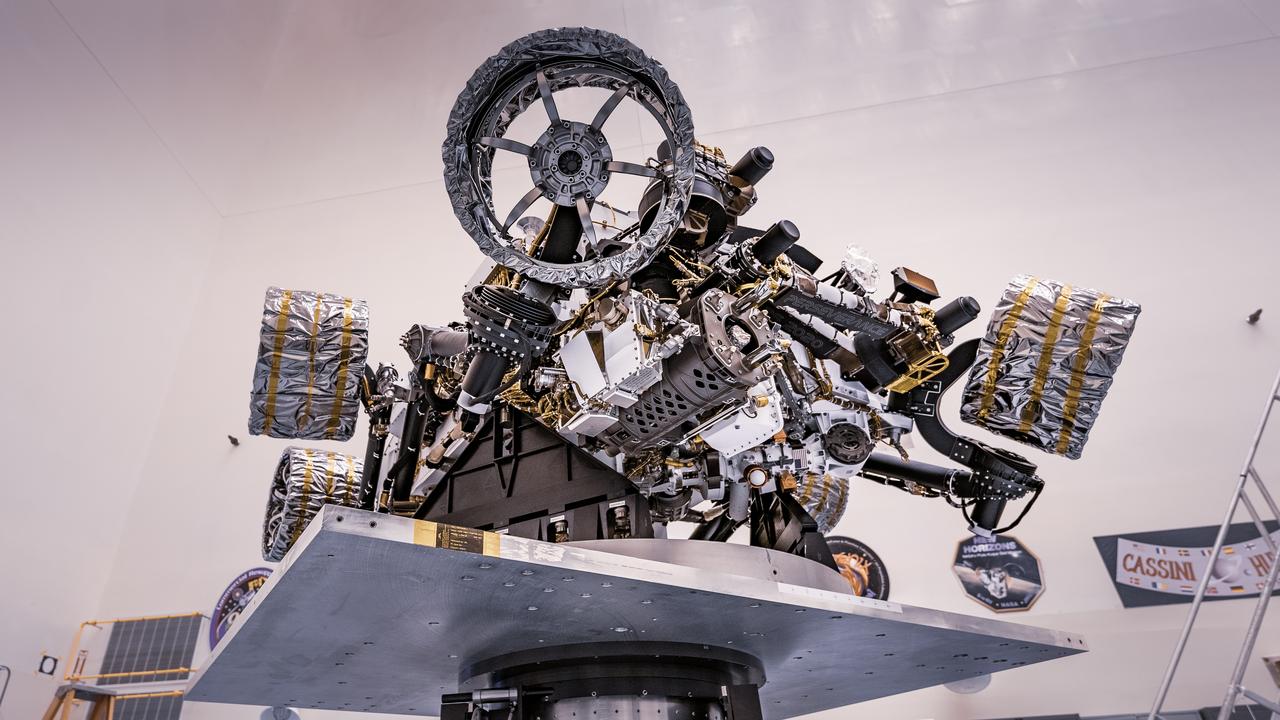
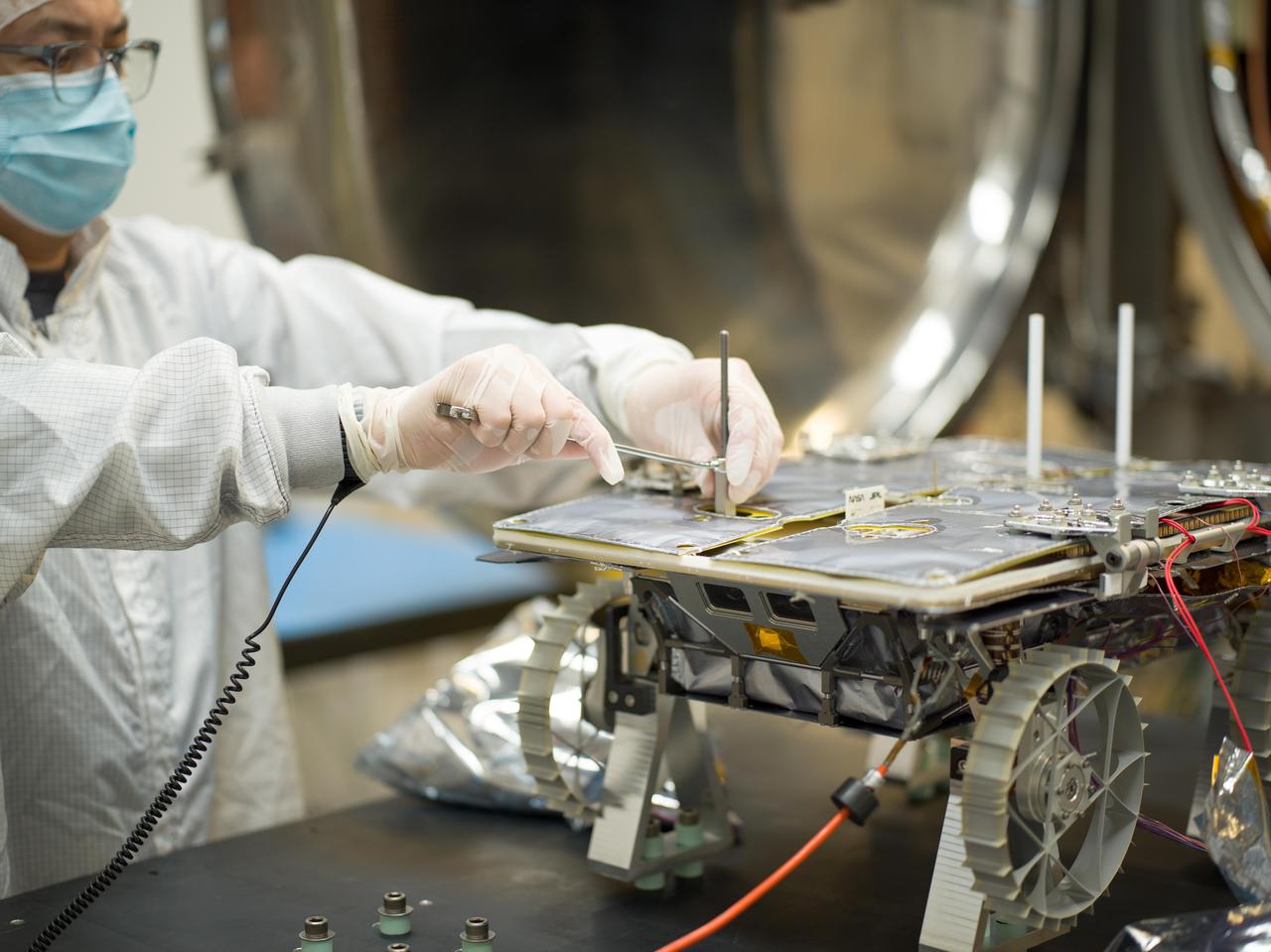
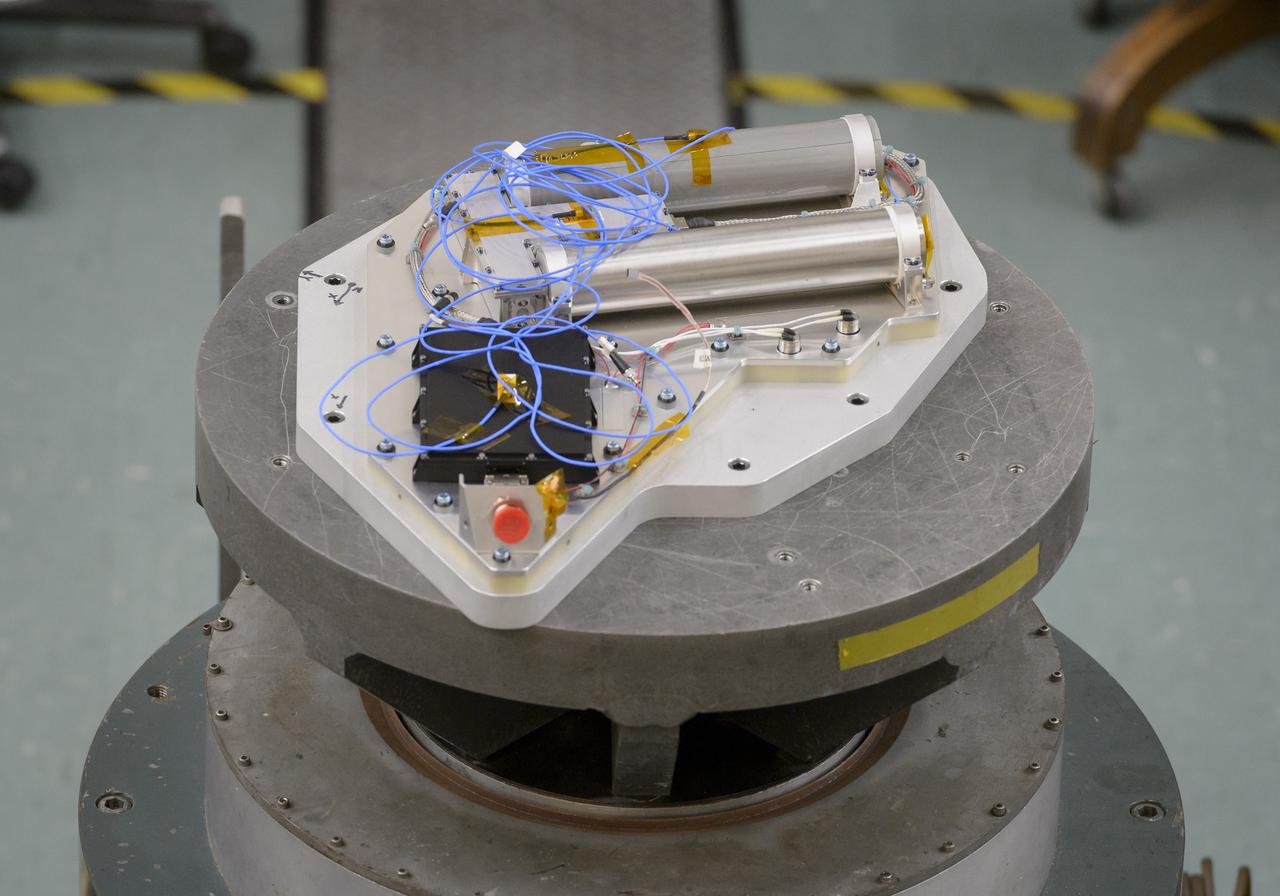
Engineers perform mass properties testing on NASA’s Mars Perseverance rover inside Kennedy Space Center’s Payload Hazardous Servicing Facility on April 7, 2020. The rover was rotated clockwise and counterclockwise on a spin table to determine the center of gravity, or the point at which weight is evenly dispersed on all sides. Establishing the rover’s center of gravity will help ensure the spacecraft will land on Mars as calculated. Perseverance will touch down on the Red Planet on Feb. 18, 2021. Liftoff aboard a United Launch Alliance Atlas V 541 rocket is targeted between July 17 and Aug. 5 from Cape Canaveral Air Force Station. NASA’s Launch Services Program based at Kennedy is managing the launch.
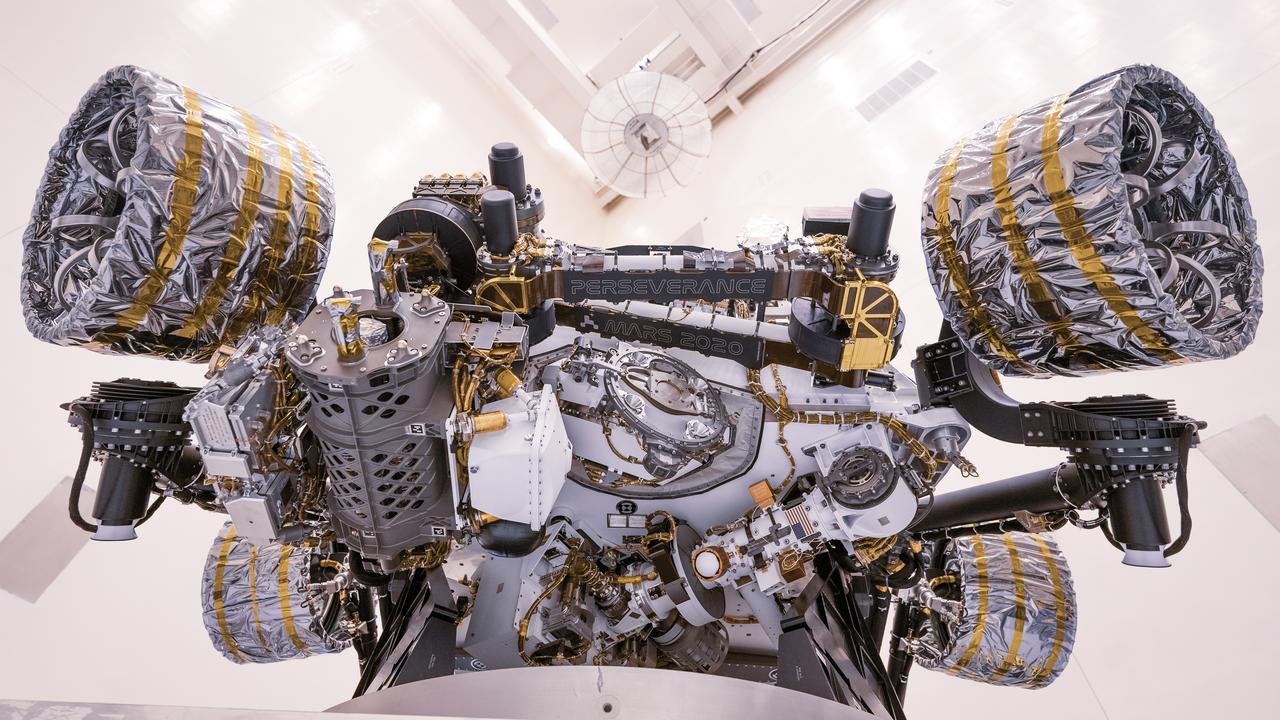
Engineers perform mass properties testing on NASA’s Mars Perseverance rover inside Kennedy Space Center’s Payload Hazardous Servicing Facility on April 7, 2020. The rover was rotated clockwise and counterclockwise on a spin table to determine the center of gravity, or the point at which weight is evenly dispersed on all sides. Establishing the rover’s center of gravity will help ensure the spacecraft will land on Mars as calculated. Perseverance will touch down on the Red Planet on Feb. 18, 2021. Liftoff aboard a United Launch Alliance Atlas V 541 rocket is targeted between July 17 and Aug. 5 from Cape Canaveral Air Force Station. NASA’s Launch Services Program based at Kennedy is managing the launch.
Engineers perform mass properties testing on NASA’s Mars Perseverance rover inside Kennedy Space Center’s Payload Hazardous Servicing Facility on April 7, 2020. The rover was rotated clockwise and counterclockwise on a spin table to determine the center of gravity, or the point at which weight is evenly dispersed on all sides. Establishing the rover’s center of gravity will help ensure the spacecraft will land on Mars as calculated. Perseverance will touch down on the Red Planet on Feb. 18, 2021. Liftoff aboard a United Launch Alliance Atlas V 541 rocket is targeted between July 17 and Aug. 5 from Cape Canaveral Air Force Station. NASA’s Launch Services Program based at Kennedy is managing the launch.

Engineers perform mass properties testing on NASA’s Mars Perseverance rover inside Kennedy Space Center’s Payload Hazardous Servicing Facility on April 7, 2020. The rover was rotated clockwise and counterclockwise on a spin table to determine the center of gravity, or the point at which weight is evenly dispersed on all sides. Establishing the rover’s center of gravity will help ensure the spacecraft will land on Mars as calculated. Perseverance will touch down on the Red Planet on Feb. 18, 2021. Liftoff aboard a United Launch Alliance Atlas V 541 rocket is targeted between July 17 and Aug. 5 from Cape Canaveral Air Force Station. NASA’s Launch Services Program based at Kennedy is managing the launch.
Engineers perform mass properties testing on NASA’s Mars Perseverance rover inside Kennedy Space Center’s Payload Hazardous Servicing Facility on April 7, 2020. The rover was rotated clockwise and counterclockwise on a spin table to determine the center of gravity, or the point at which weight is evenly dispersed on all sides. Establishing the rover’s center of gravity will help ensure the spacecraft will land on Mars as calculated. Perseverance will touch down on the Red Planet on Feb. 18, 2021. Liftoff aboard a United Launch Alliance Atlas V 541 rocket is targeted between July 17 and Aug. 5 from Cape Canaveral Air Force Station. NASA’s Launch Services Program based at Kennedy is managing the launch.
Engineers perform mass properties testing on NASA’s Mars Perseverance rover inside Kennedy Space Center’s Payload Hazardous Servicing Facility on April 7, 2020. The rover was rotated clockwise and counterclockwise on a spin table to determine the center of gravity, or the point at which weight is evenly dispersed on all sides. Establishing the rover’s center of gravity will help ensure the spacecraft will land on Mars as calculated. Perseverance will touch down on the Red Planet on Feb. 18, 2021. Liftoff aboard a United Launch Alliance Atlas V 541 rocket is targeted between July 17 and Aug. 5 from Cape Canaveral Air Force Station. NASA’s Launch Services Program based at Kennedy is managing the launch.
Engineers perform mass properties testing on NASA’s Mars Perseverance rover inside Kennedy Space Center’s Payload Hazardous Servicing Facility on April 7, 2020. The rover was rotated clockwise and counterclockwise on a spin table to determine the center of gravity, or the point at which weight is evenly dispersed on all sides. Establishing the rover’s center of gravity will help ensure the spacecraft will land on Mars as calculated. Perseverance will touch down on the Red Planet on Feb. 18, 2021. Liftoff aboard a United Launch Alliance Atlas V 541 rocket is targeted between July 17 and Aug. 5 from Cape Canaveral Air Force Station. NASA’s Launch Services Program based at Kennedy is managing the launch.

Testing at NASA Jet Propulsion Laboratory in August 2009 is assessing possible maneuvers that the Mars rover Spirit might use for escaping from a patch of soft soil where it is embedded at a Martian site called Troy.

This image shows a test using an engineering model of the soil scoop for NASA Mars rover Curiosity. The scoop dips to about 1.4 inches 3.5 centimeters deep. This test took place at NASA Jet Propulsion Laboratory, Pasadena , Calif., in 2011.
An engineer prepares a small rover – part of NASA's CADRE (Cooperative Autonomous Distributed Robotic Exploration) technology demonstration that's headed to the Moon – for testing in a thermal vacuum chamber at the agency's Jet Propulsion Laboratory in Southern California in October 2023. Slated to arrive at the Moon in 2024 as part of NASA's CLPS (Commercial Lunar Payload Services) initiative, CADRE is designed to demonstrate that multiple robots can cooperate and explore together autonomously – without direct input from human mission controllers. A trio of the miniature solar-powered rovers, each about the size of a carry-on suitcase, will explore the Moon as a team, communicating via radio with each other and a base station aboard a lunar lander. By taking simultaneous measurements from multiple locations, CADRE will also demonstrate how multirobot missions can record data impossible for a single robot to achieve – a tantalizing prospect for future missions. The rover being tested is the first flight model to be completed. Thermal vacuum testing simulates the harsh environment the rovers will face on the journey to the Moon and on the lunar surface: All the air is pumped out of the chamber and the temperature is cycled to high and low extremes. https://photojournal.jpl.nasa.gov/catalog/PIA25669
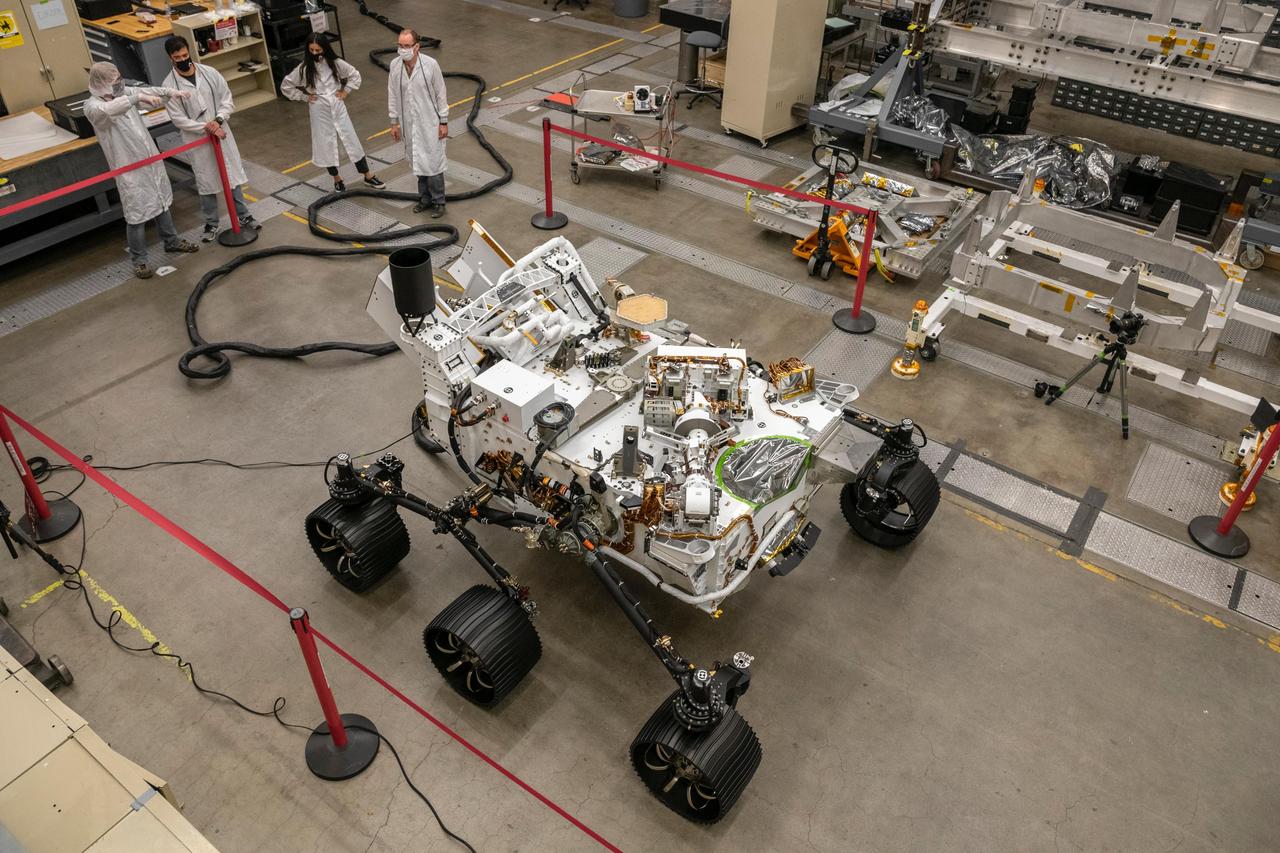
Engineers test drive the Earth-bound twin of NASA's Perseverance Mars rover for the first time in a warehouselike assembly room at the agency's Jet Propulsion Laboratory in Southern California on Sept. 1, 2020. This full-scale engineering version of Perseverance helps the mission team gauge how hardware and software will perform before they transmit commands to the real rover on Mars. This vehicle system test bed (VSTB) rover is also known as OPTIMISM (Operational Perseverance Twin for Integration of Mechanisms and Instruments Sent to Mars). The Mars 2020 Perseverance astrobiology mission is part of America's larger Moon to Mars exploration approach that includes missions to the Moon as a way to prepare for human exploration of the Red Planet. Charged with sending the first woman and next man to the Moon by 2024, NASA will establish a sustained human presence on and around the Moon by 2028 through NASA's Artemis program. https://photojournal.jpl.nasa.gov/catalog/PIA23964

The bit in the rotary-percussion drill of NASA Mars rover Curiosity left its mark in a target patch of rock called John Klein during a test on Feb. 2, 2013, in preparation for the first drilling of a rock by the rover.

NASA next Mars rover, Curiosity, drives up a ramp during a test at NASA Jet Propulsion Laboratory, Pasadena, Calif. The rover, like its smaller predecessors already on Mars, uses a rocker bogie suspension system to drive over uneven ground.

A development model rover that is part of NASA's CADRE (Cooperative Autonomous Distributed Robotic Exploration) technology demonstration took its first autonomous drive around the Mars Yard at the agency's Jet Propulsion Laboratory in Southern California in June 2023. The CADRE team tested a new wheel design, surface navigation software, and mobility capabilities, among other aspects of the project. Engineer Kristopher Sherrill is shown recording video of the test. The rover being tested is similar in size and appearance to the flight models of the CADRE rovers, which are still being built. Slated to arrive at the Moon in spring 2024 as part of NASA's CLPS (Commercial Lunar Payload Services) initiative, CADRE is designed to demonstrate that multiple robots can cooperate and explore together autonomously – without direct input from human mission controllers. A trio of the miniature solar-powered rovers, each about the size of a carry-on suitcase, will explore the Moon as a team, communicating via radio with each other and a base station aboard a lunar lander. By taking simultaneous measurements from multiple locations, CADRE will also demonstrate how multirobot missions can record data impossible for a single robot to achieve – a tantalizing prospect for future missions. Movie available at https://photojournal.jpl.nasa.gov/catalog/PIA25665

Four student teams: Blue, Gold, Green and Red built, designed and tested a LEGO robotic Martian rover prototype at NASA's Armstrong Flight Research Center. The teams competed against each other during a four-day workshop coordinated by the NASA Community College Aerospace Scholars. Each team prepared a marketing package to "sell" their design to NASA based on the performance of its Martian rover.

The suspension system on NASA Mars rover Curiosity easily accommodates rolling over a ramp in this Sept. 10, 2010, test drive inside the Spacecraft Assembly Facility at NASA Jet Propulsion Laboratory, Pasadena, Calif.
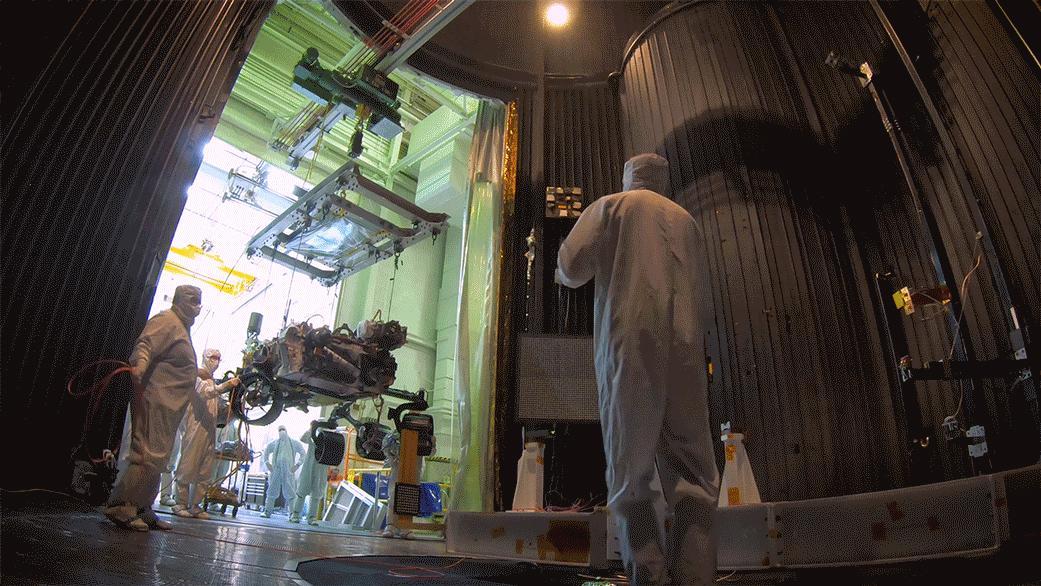
This image, taken on Oct. 9, 2019, at NASA's Jet Propulsion Laboratory in Pasadena, California, captures the move of the Mars 2020 rover into a large vacuum chamber for testing in Mars-like environmental conditions. Movie available at https://photojournal.jpl.nasa.gov/catalog/PIA23470

In this picture from Sept. 28, 2019, engineers and technicians working on the Mars 2020 spacecraft at NASA's Jet Propulsion Laboratory in Pasadena, California, look on as a crane lifts the rocket-powered descent stage away from the rover after a test. https://photojournal.jpl.nasa.gov/catalog/PIA23466

Science Crew Operations and Utility Testbed (SCOUT) Rover testing with Advanced Extravehicular Activity (EVA) Suit on Johnson Space Center (JSC) Fields near Avenue B. View of two technicians with the SCOUT Rover during testing.

After an activity called the mini drill test by NASA Mars rover Curiosity, the rover MAHLI camera recorded this view of the results. The test generated a ring of powdered rock for inspection in advance of the rover first full drilling.

Rover-team members at NASA Jet Propulsion Laboratory, Pasadena, Calif., check slight movements by a test rover during tests simulating the challenge of getting NASA Mars Exploration Rover Spirit out of a sand trap on Mars.

Technicians move a full-scale engineering version of NASA's Perseverance Mars rover into to its new home — a garage facing the Mars Yard at the agency's Jet Propulsion Laboratory in Southern California — on Sept. 4, 2020. This vehicle system test bed (VSTB) rover was built in a warehouselike assembly room not far from the Mars Yard — an area that simulates the Red Planet's surface — and enables the mission team to test how hardware and software will perform before they transmit commands to the real rover on Mars. It also goes by the name OPTIMISM (Operational Perseverance Twin for Integration of Mechanisms and Instruments Sent to Mars). The Perseverance rover's astrobiology mission will search for signs of ancient microbial life. It will also characterize the planet's climate and geology, pave the way for human exploration of the Red Planet, and be the first planetary mission to collect and cache Martian rock and regolith (broken rock and dust). Subsequent missions, currently under consideration by NASA in cooperation with the European Space Agency, would send spacecraft to Mars to collect these cached samples from the surface and return them to Earth for in-depth analysis. The Mars 2020 mission is part of a larger program that includes missions to the Moon as a way to prepare for human exploration of the Red Planet. Charged with returning astronauts to the Moon by 2024, NASA will establish a sustained human presence on and around the Moon by 2028 through NASA's Artemis lunar exploration plans. Movie available at https://photojournal.jpl.nasa.gov/catalog/PIA23965

Virtual Intelligent Planetary Exploration Rover, VIPER Mobility Platform Testing

Virtual Intelligent Planetary Exploration Rover, VIPER Mobility Platform Testing

Virtual Intelligent Planetary Exploration Rover, VIPER Mobility Platform Testing
Virtual Intelligent Planetary Exploration Rover, VIPER Mobility Platform Testing

Virtual Intelligent Planetary Exploration Rover, VIPER Mobility Platform Testing
Virtual Intelligent Planetary Exploration Rover, VIPER Mobility Platform Testing
Virtual Intelligent Planetary Exploration Rover, VIPER Mobility Platform Testing
Virtual Intelligent Planetary Exploration Rover, VIPER Mobility Platform Testing

Virtual Intelligent Planetary Exploration Rover, VIPER Mobility Platform Testing

Virtual Intelligent Planetary Exploration Rover, VIPER Mobility Platform Testing

Virtual Intelligent Planetary Exploration Rover, VIPER Mobility Platform Testing

Virtual Intelligent Planetary Exploration Rover, VIPER Mobility Platform Testing

Virtual Intelligent Planetary Exploration Rover, VIPER Mobility Platform Testing

Virtual Intelligent Planetary Exploration Rover, VIPER Mobility Platform Testing

Virtual Intelligent Planetary Exploration Rover, VIPER Mobility Platform Testing
Virtual Intelligent Planetary Exploration Rover, VIPER Mobility Platform Testing
Virtual Intelligent Planetary Exploration Rover, VIPER Mobility Platform Testing
Virtual Intelligent Planetary Exploration Rover, VIPER Mobility Platform Testing

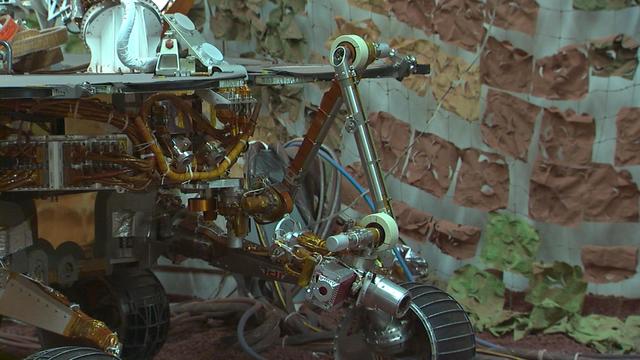
In the summer and fall of 2017, the team operating NASA's Curiosity Mars rover conducted tests in the "Mars Yard" at NASA's Jet Propulsion Laboratory, Pasadena, California, to develop techniques that Curiosity might be able to use to resume drilling into rocks on Mars. JPL robotics engineer Vladimir Arutyunov, in this June 29, 2017, photo, checks the test rover's drill bit at its contact point with a rock. Note that the stabilizer post visible to the right of the bit is not in contact with the rock, unlike the positioning used and photographed by Curiosity when drilling into rocks on Mars in 2013 to 2016. In late 2016, after Curiosity's drill had collected sample material from 15 Martian rocks, the drill's feed mechanism ceased working reliably. That motorized mechanism moved the bit forward or back with relation to the stabilizer posts on either side of the bit. In normal drilling by Curiosity, the stabilizers were positioned on the target rock first, and then the feed mechanism extended the rotation-percussion bit into the rock. In the alternative technique seen here, called "feed-extended drilling," the test rover's stabilizers are not used to touch the rock. The bit is advanced into the rock by motion of the robotic arm rather than the drill's feed mechanism. https://photojournal.jpl.nasa.gov/catalog/PIA22061
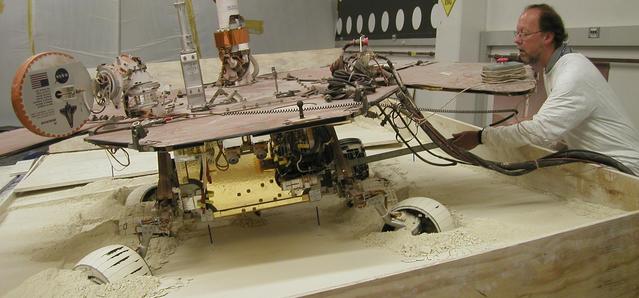
The team developing NASA Mars Science Laboratory calls this test rover Scarecrow because the vehicle does not include a computer brain. Mobility engineers use this test rover to evaluate mobility and suspension performance.

This grouping of two test rovers and a flight spare provides a graphic comparison of three generations of Mars rovers developed at NASA Jet Propulsion Laboratory, Pasadena, Calif. The setting is JPL Mars Yard testing area.

NASA Mars Exploration Rover team members continued longer-duration test runs this week, driving the test rover forward and uphill in a crab-like position. These long-duration drives will continue through the end of next week.

Mike Seibert and Sharon Laubach, engineers on NASA Mars Exploration Rover team at the Jet Propulsion Laboratory, Pasadena, check the exact position of a test rover in preparation for the next test of a possible maneuver for Spirit to use on Mars.

This grouping of two test rovers and a flight spare provides a graphic comparison of three generations of Mars rovers developed at NASA Jet Propulsion Laboratory, Pasadena, Calif. The setting is JPL Mars Yard testing area.

Virtual Intelligent Planetary Exploration Rover, VIPER Mobility Platform Testing

Virtual Intelligent Planetary Exploration Rover, VIPER Mobility Platform Testing

Virtual Intelligent Planetary Exploration Rover, VIPER Mobility Platform Testing

Virtual Intelligent Planetary Exploration Rover, VIPER Mobility Platform Testing
Virtual Intelligent Planetary Exploration Rover, VIPER Mobility Platform Testing
Virtual Intelligent Planetary Exploration Rover, VIPER Mobility Platform Testing

Virtual Intelligent Planetary Exploration Rover, VIPER Mobility Platform Testing
Virtual Intelligent Planetary Exploration Rover, VIPER Mobility Platform Testing

Virtual Intelligent Planetary Exploration Rover, VIPER Mobility Platform Testing

Members of the Mars Exploration Rovers Assembly, Test and Launch Operations team gather around NASA Rover 2 and its predecessor, a flight spare of the Pathfinder mission Sojourner rover, named Marie Curie.

With a slope of about 10 degrees and a pointy rock under the test rover belly, this sandbox setup at NASA JPL, is ready for engineers to use the test rover to assess possible moves for getting Mars rover Spirit out of a patch of loose Martian soil.
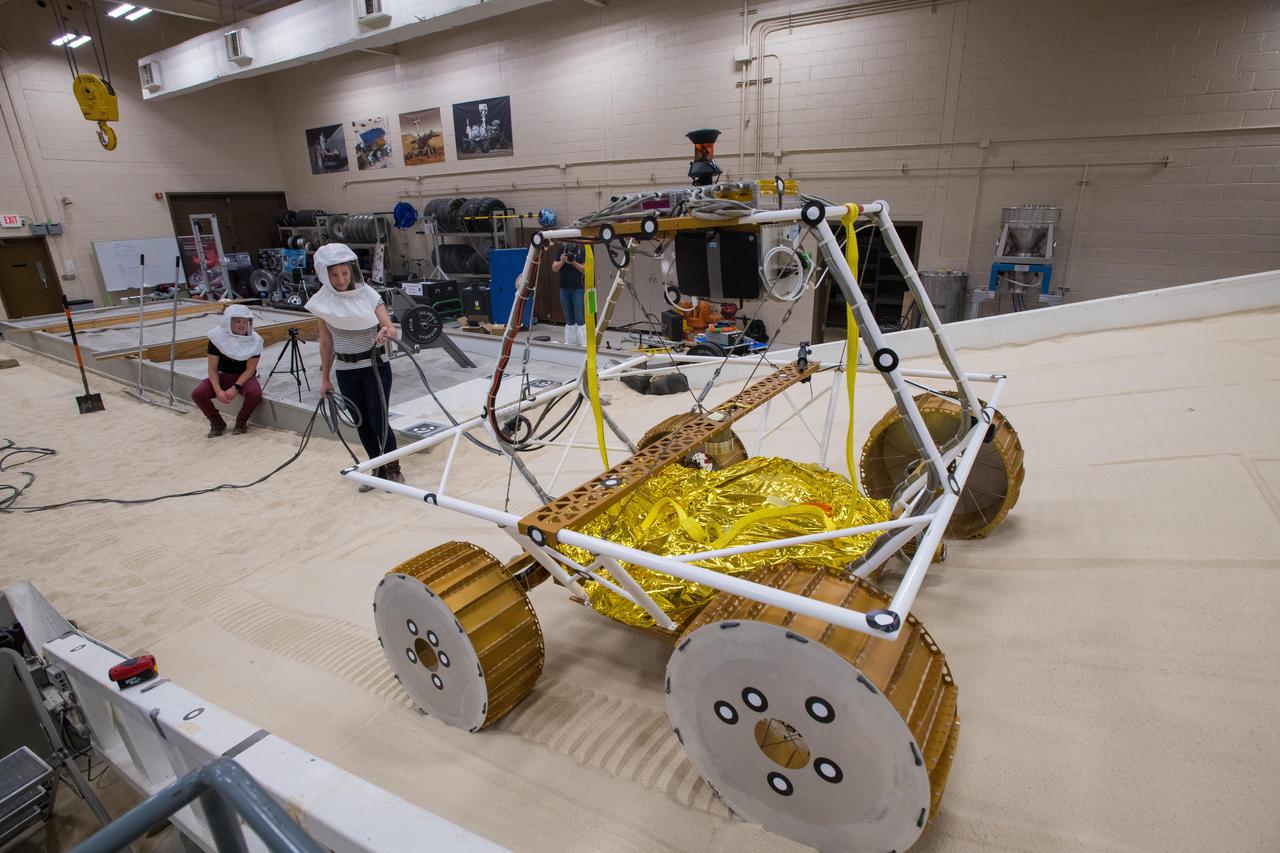
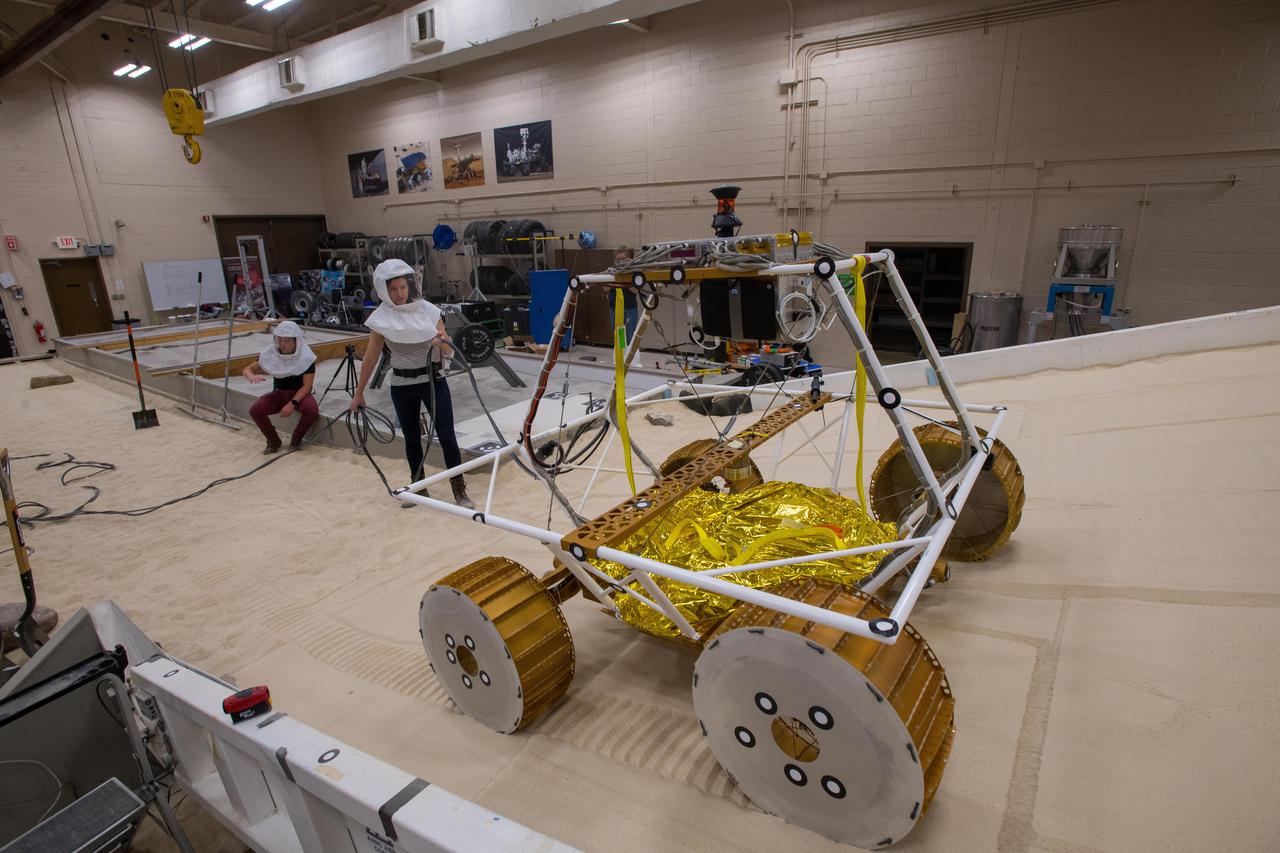
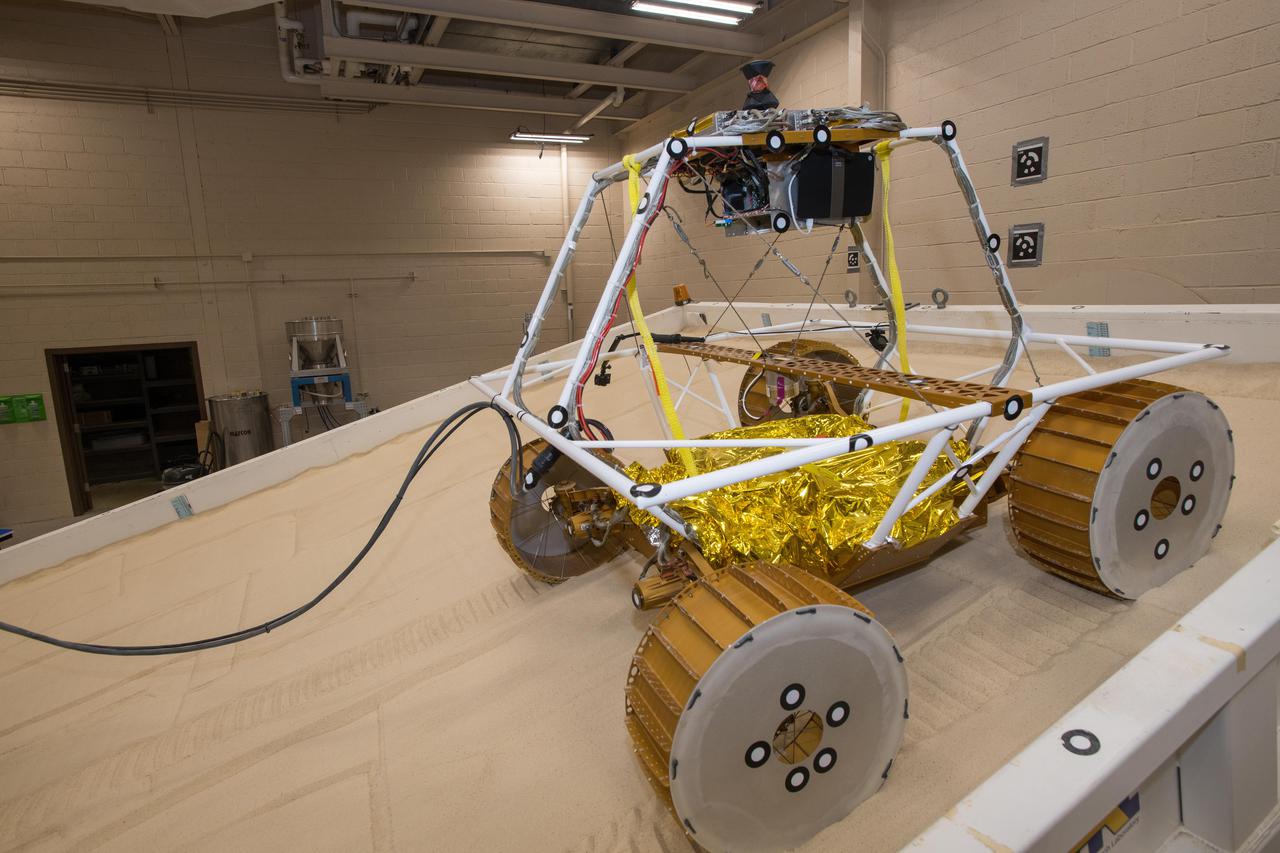
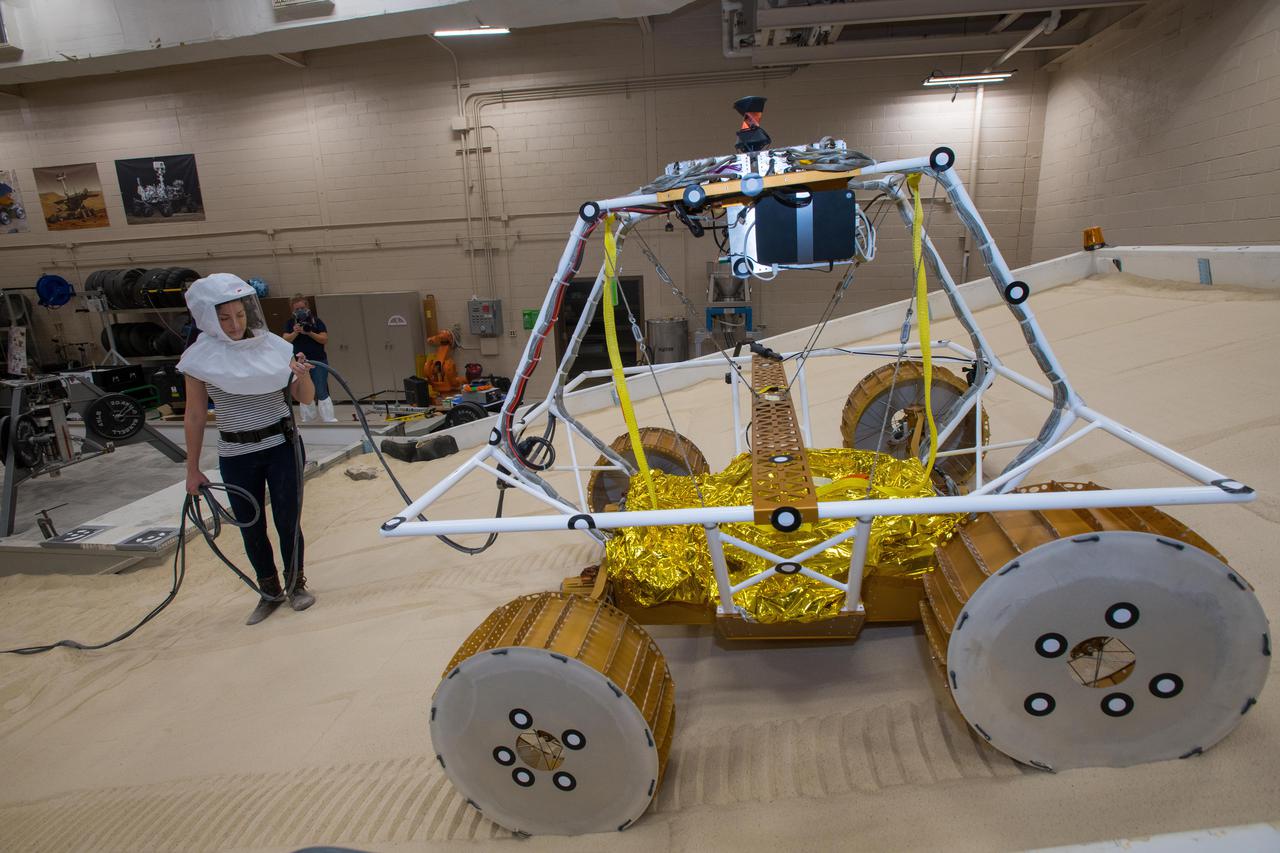
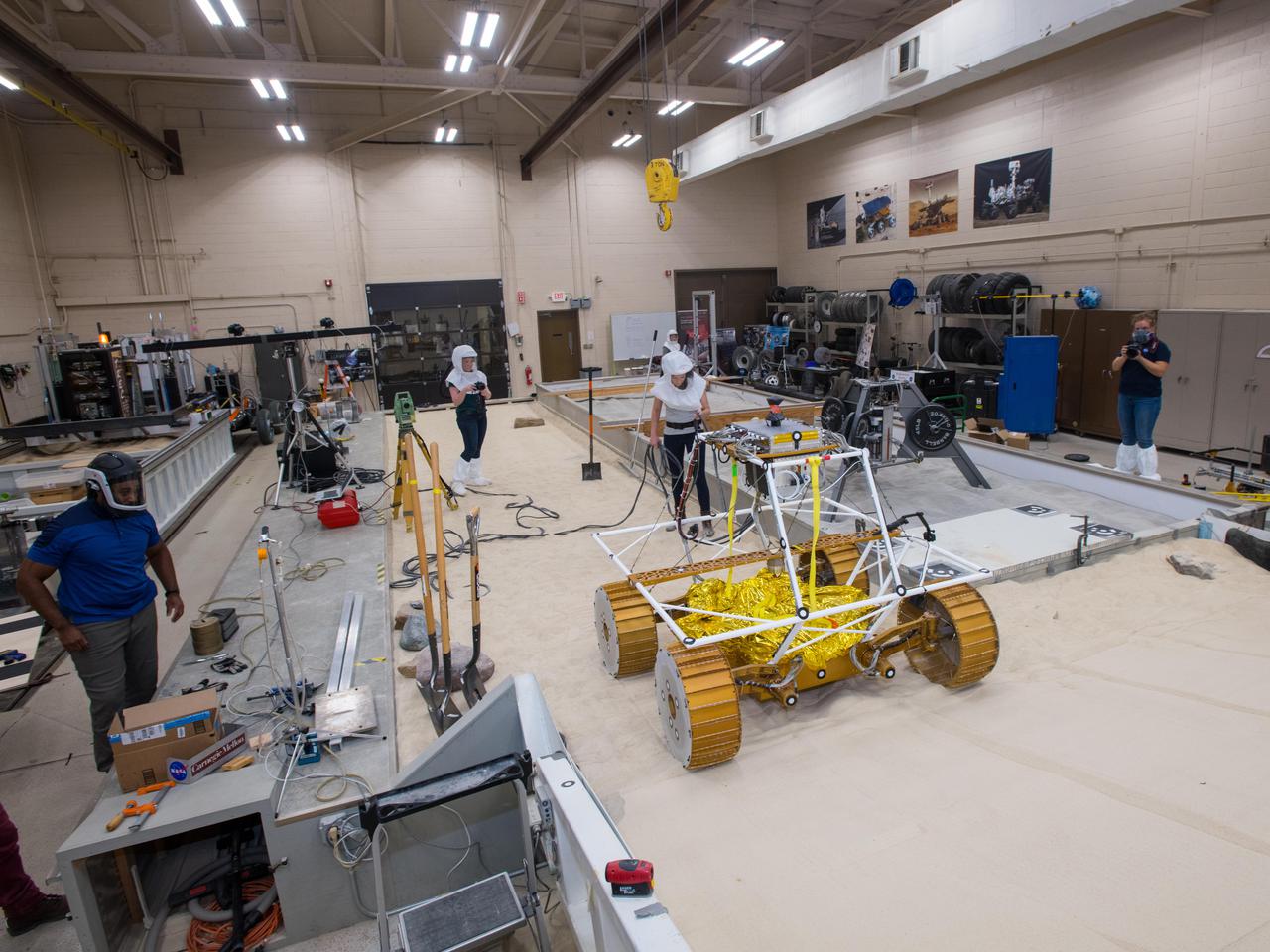
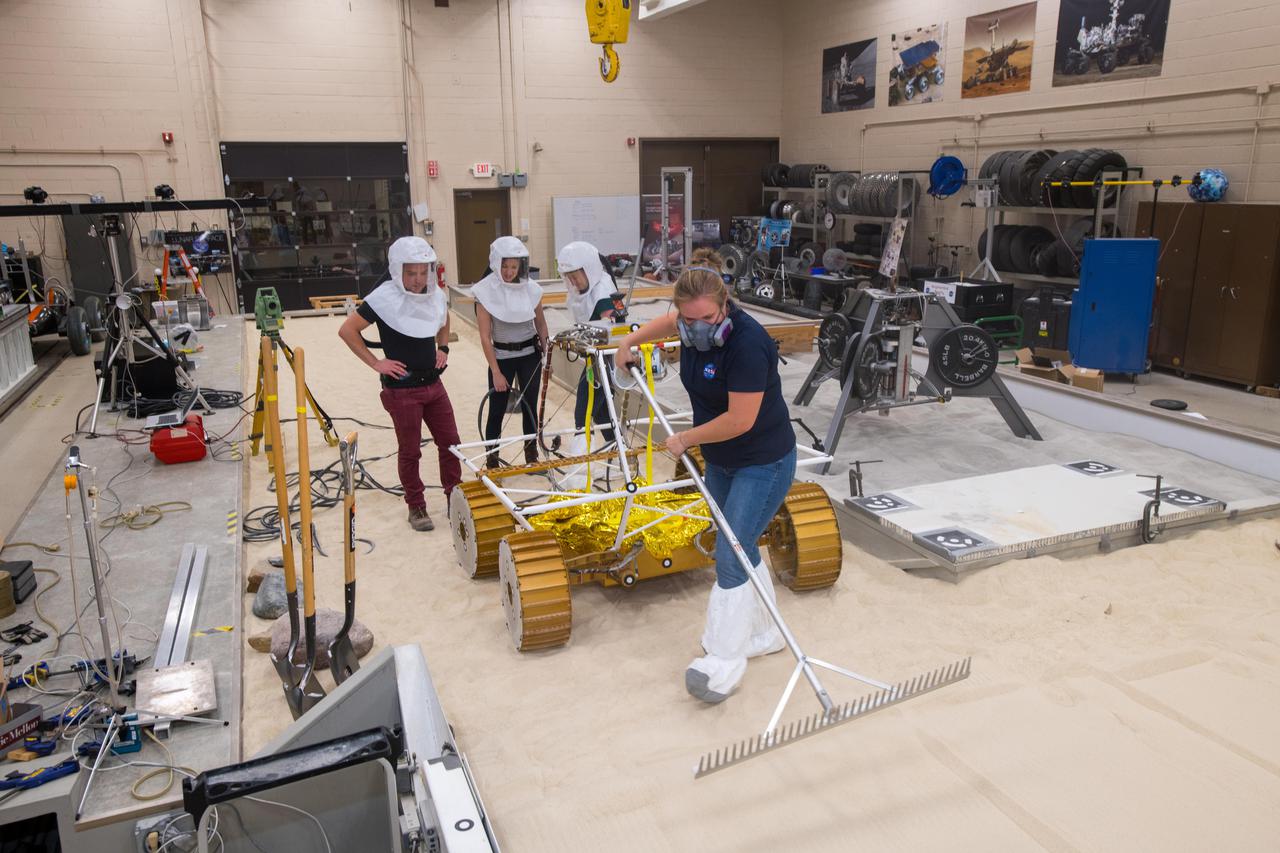
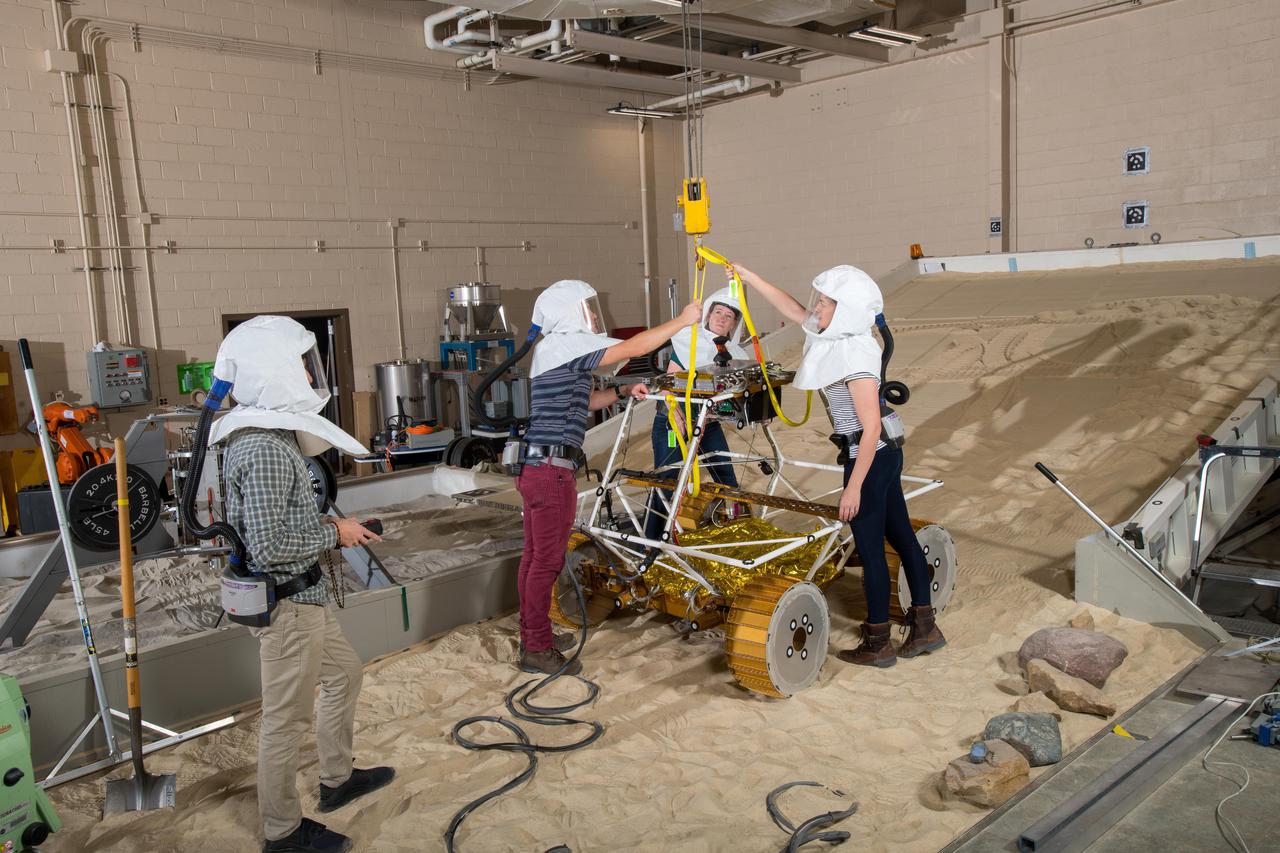
Virtual Intelligent Planetary Exploration Rover, VIPER Mobility Platform Testing An engineering model of the Volatiles Investigating Polar Exploration Rover, or VIPER, is tested in the Simulated Lunar Operations Laboratory at NASA’s Glenn Research Center in Cleveland, Ohio. About the size of a golf cart, VIPER is a mobile robot that will roam around the Moon’s South Pole looking for water ice in the region and for the first time ever, actually sample the water ice at the same pole where the first woman and next man will land in 2024 under the Artemis program. The large, adjustable soil bin contains lunar simulant and allows engineers to mimic the Moon’s terrain. Engineers from NASA’s Johnson Space Center in Houston, where the rover was designed and built, joined the Glenn team to complete the tests. Test data will be used to evaluate the traction of the vehicle and wheels, determine the power requirements for a variety of maneuvers and compare methods of traversing steep slopes. Respirators are worn by researchers to protect against the airborne silica that is present during testing. VIPER is a collaboration within and beyond the agency. NASA's Ames Research Center in Silicon Valley is managing the project, leading the mission’s science, systems engineering, real-time rover surface operations and software. The rover’s instruments are provided by Ames, NASA’s Kennedy Space Center in Florida and commercial partner, Honeybee Robotics in California. The spacecraft, lander and launch vehicle that will deliver VIPER to the surface of the Moon will be provided through NASA’s Commercial Lunar Payload Services program, delivering science and technology payloads to and near the Moon.
This frame from a video shows an engineering test for NASA Curiosity rover. During the test, the clear dust covers on the Hazard-Avoidance cameras were popped off.

Virtual Intelligent Planetary Exploration Rover, VIPER Mobility Platform Testing

Virtual Intelligent Planetary Exploration Rover, VIPER Mobility Platform Testing

Virtual Intelligent Planetary Exploration Rover, VIPER Mobility Platform Testing

A test operator in clean-room garb observes rolling of the wheels during the first drive test of NASA Curiosity rover, on July 23, 2010. Technicians and engineers conducted the drive test at the Jet Propulsion Laboratory in Pasadena, Calif.

Volatiles Investigating Polar Exploration Rover, VIPER Testing in the Simulated Lunar Operations Lab, SLOPE Laboratory
Researchers at NASA’s Ames Research Center in California’s Silicon Valley complete a successful vibration test of the Neutron Spectrometer System or NSS, designed to sniff out water below the surface of the Moon, successfully sailed through a “shake” test to simulate the turbulent conditions of launch. . This is one of the final tests needed to prepare the instrument for a flight to the Moon aboard Astrobotic Technology’s Peregrine lander, as part of the agency’s Commercial Lunar Payload Services program. The vibration test simulates the forces the instrument will be subjected to during launch when the lander blasts off aboard a United Launch Alliance Vulcan Centaur rocket. The NSS will fly on the Volatiles Investigating Polar Exploration Rover, or VIPER.

This frame from a video shows the mast of NASA Curiosity rover deploying in a pre-launch test.

This image taken at NASA Jet Propulsion Laboratory shows a rover test drive up a manmade slope.
Engineers for NASA Mars Exploration Rover Mission are completing assembly and testing for the twin robotic geologists at JPL.
Footage taken at the JPL In-Situ Instruments Laboratory, or testbed, shows engineers practicing the deployment of the test rover robotic arm.

Engineers for NASA Mars Exploration Rover Mission are completing assembly and testing for the twin robotic geologists at JPL.

This image is from a series of test images to calibrate the 34-millimeter Mast Camera on NASA Curiosity rover. It was taken on Aug. 23, 2012 and looks south-southwest from the rover landing site.
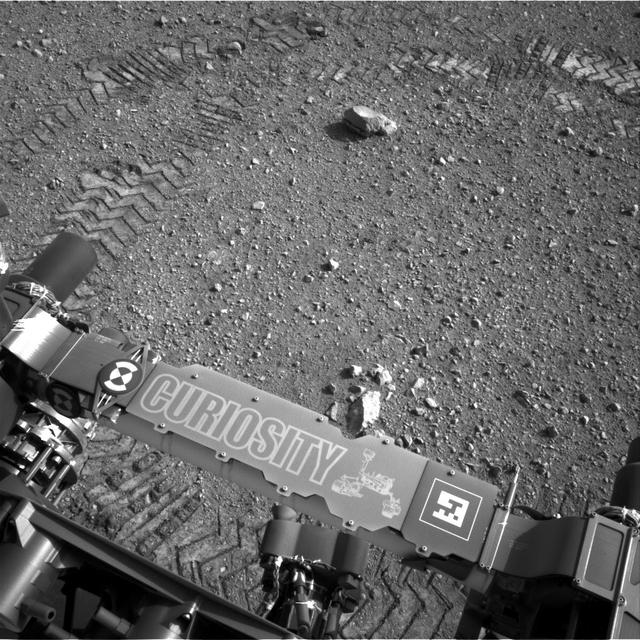
This image shows a close-up of track marks from the first test drive of NASA Curiosity rover. The rover arm is visible in the foreground. A close inspection of the tracks reveals a unique, repeating pattern: Morse code for JPL.
This view NASA Curiosity Mars Rover shows the rover drill in position for a mini-drill test to assess whether a rock target called Mojave is appropriate for full-depth drilling to collect a sample. It was taken on Jan. 13, 2015.

NASA Mars Exploration Rover team members prepare a testing setup for a subsequent experiment after an experiment driving the rover in a crablike motion, with all four corner wheels angled to the right.

Camera and robotic-arm maneuvers for taking a self-portrait of the NASA Curiosity rover on Mars were checked first, at NASA Jet Propulsion Laboratory in Pasadena, Calif., using the main test rover for the Curiosity.

Rover engineers check how a test rover moves in material chosen to simulate some difficult Mars driving conditions. The scene is inside the In-Situ Instrument Laboratory at NASA Jet Propulsion Laboratory, Pasadena, Calif.

Testing of the robotic arm on NASA Mars rover Curiosity on Sept. 3, 2010, included movements of the arm while the rover was on a table tilted to 20 degrees to simulate a sloped surface on Mars.
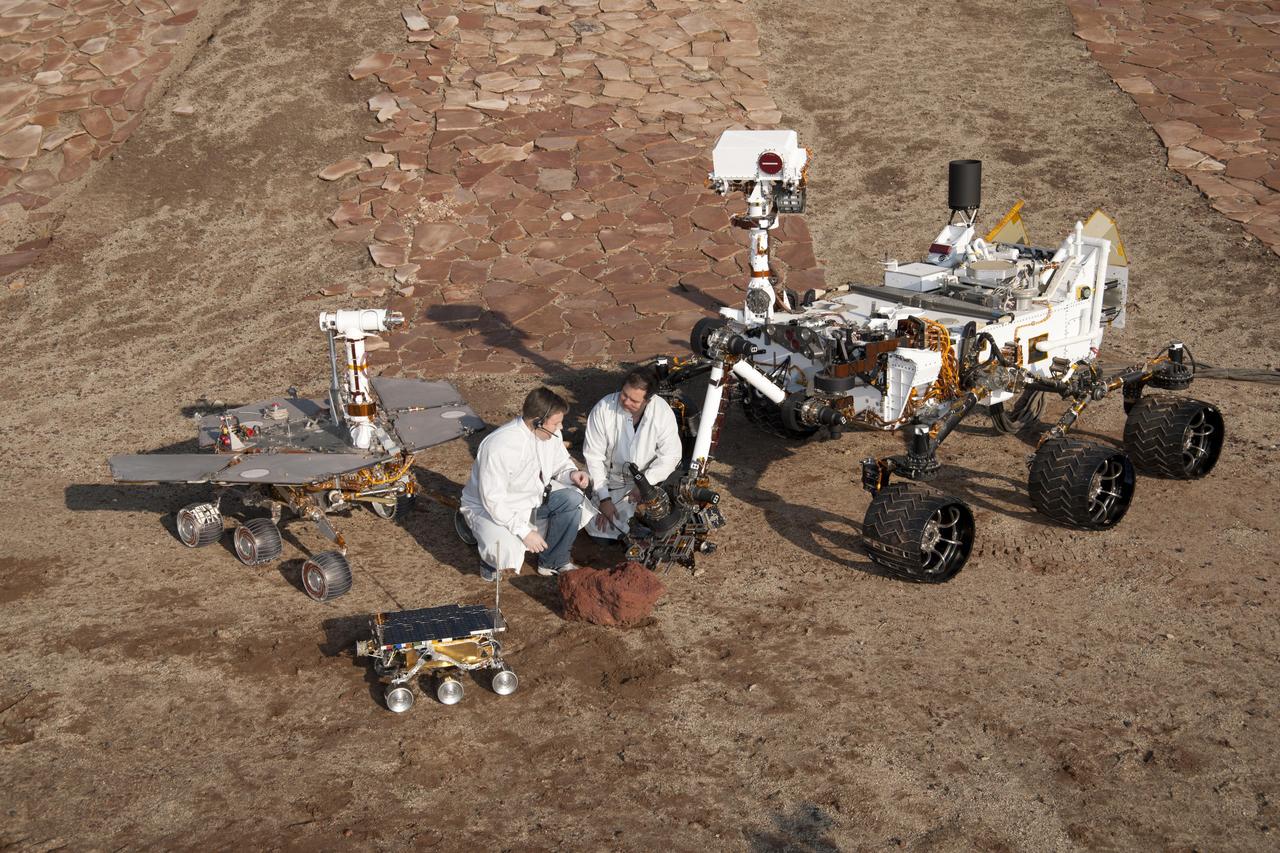
Two spacecraft engineers stand with three generations of Mars rovers developed at NASA JPL, Pasadena, Ca. Front and center is a flight spare of Sojourner, left is a working sibling to Spirit and Opportunity, right is test rover Curiosity.

In an activity called the mini drill test, NASA Mars rover Curiosity used its drill to generate this ring of powdered rock for inspection in advance of the rover first full drilling.

Rover engineers check how a test rover moves in material chosen to simulate some difficult Mars driving conditions. The scene is inside the In-Situ Instrument Laboratory at NASA Jet Propulsion Laboratory, Pasadena, Calif.

This still image illustrates what the Mars Exploration Rover Spirit will look like as it rolls off the northeastern side of the lander on Mars. The image was taken from footage of rover testing at JPL In-Situ Instruments Laboratory, or Testbed.

This image shows preparation for March 2011 testing of the Mars Science Laboratory rover, Curiosity, in a space-simulation chamber; the rover will go through operational sequences in environmental conditions similar to what it will experience on Mars.