
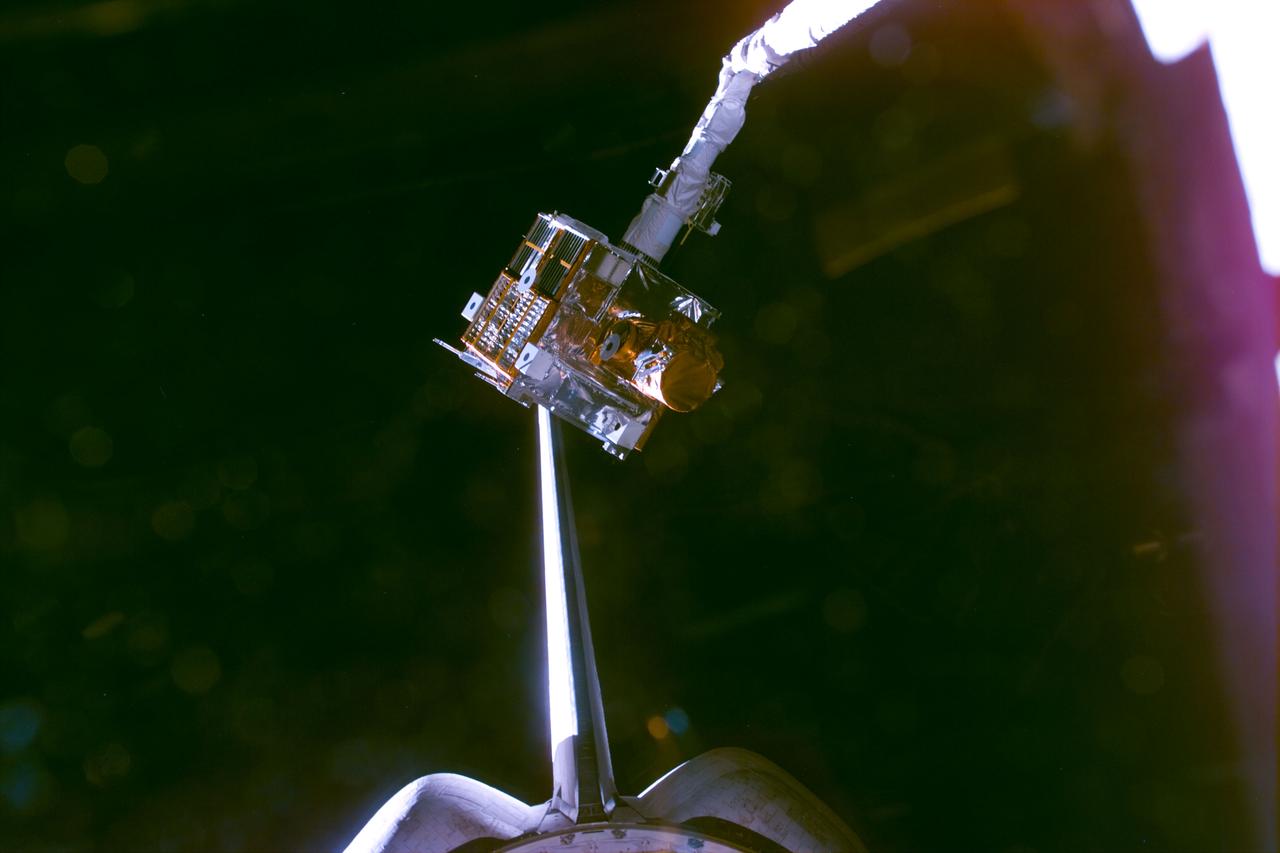
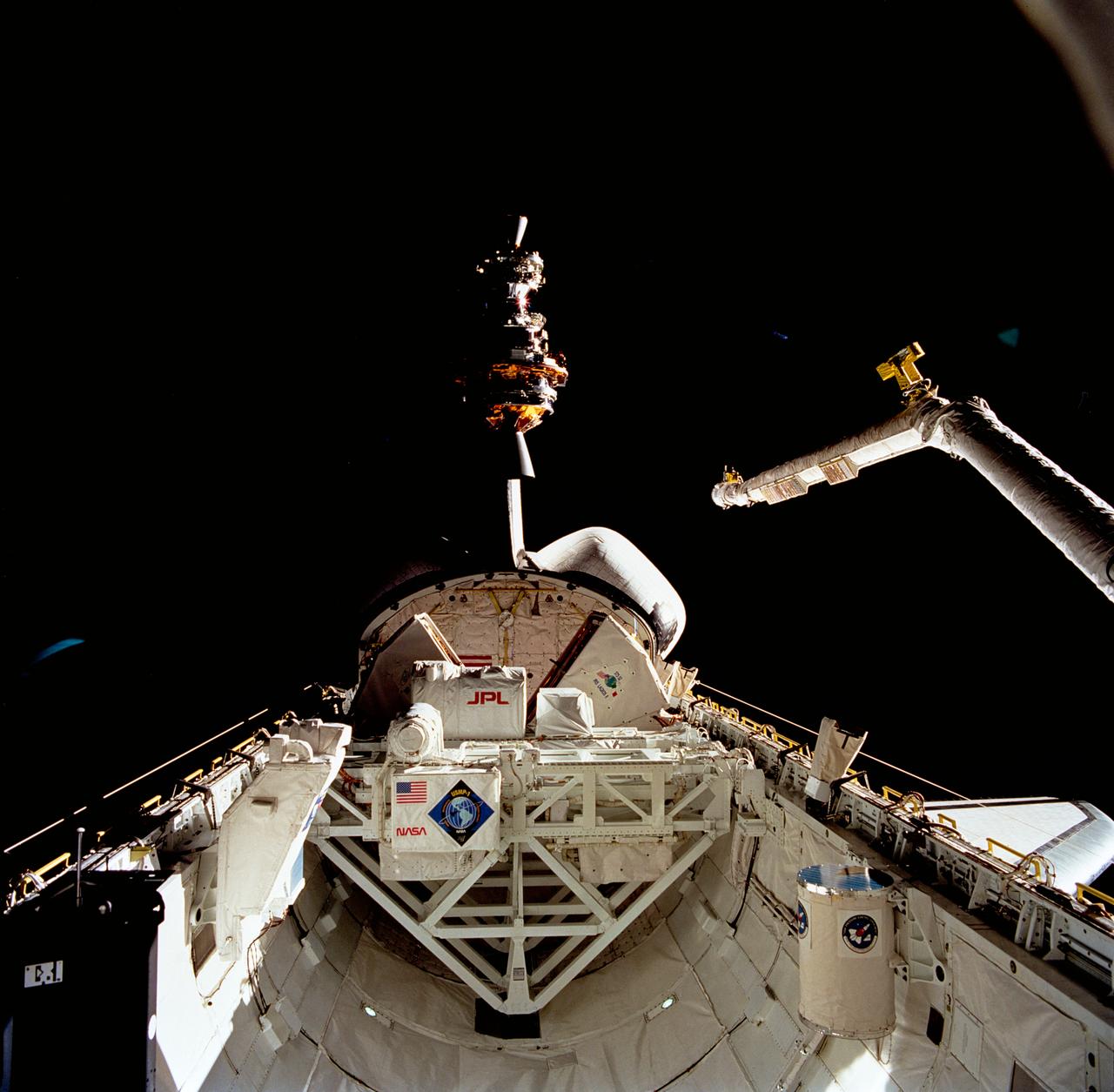
STS064-76-035 (15 Sept. 1994) --- Backdropped against the darkness of space, the Shuttle Pointed Autonomous Research Tool for Astronomy 201 (SPARTAN-201) satellite is lined up with the space shuttle Discovery's Remote Manipulator System (RMS) arm for re-capture. The free-flying spacecraft had remained some 40 miles away from Discovery for over two days. Photo credit: NASA or National Aeronautics and Space Administration

51I-44-081 (1 Sept 1985) --- Astronaut James D. van Hoften on the Discovery's remote manipulator system (RMS) arm visually tracks the distant Syncom IV-3 communications satellite after its second release, on Sept. 1, 1985.
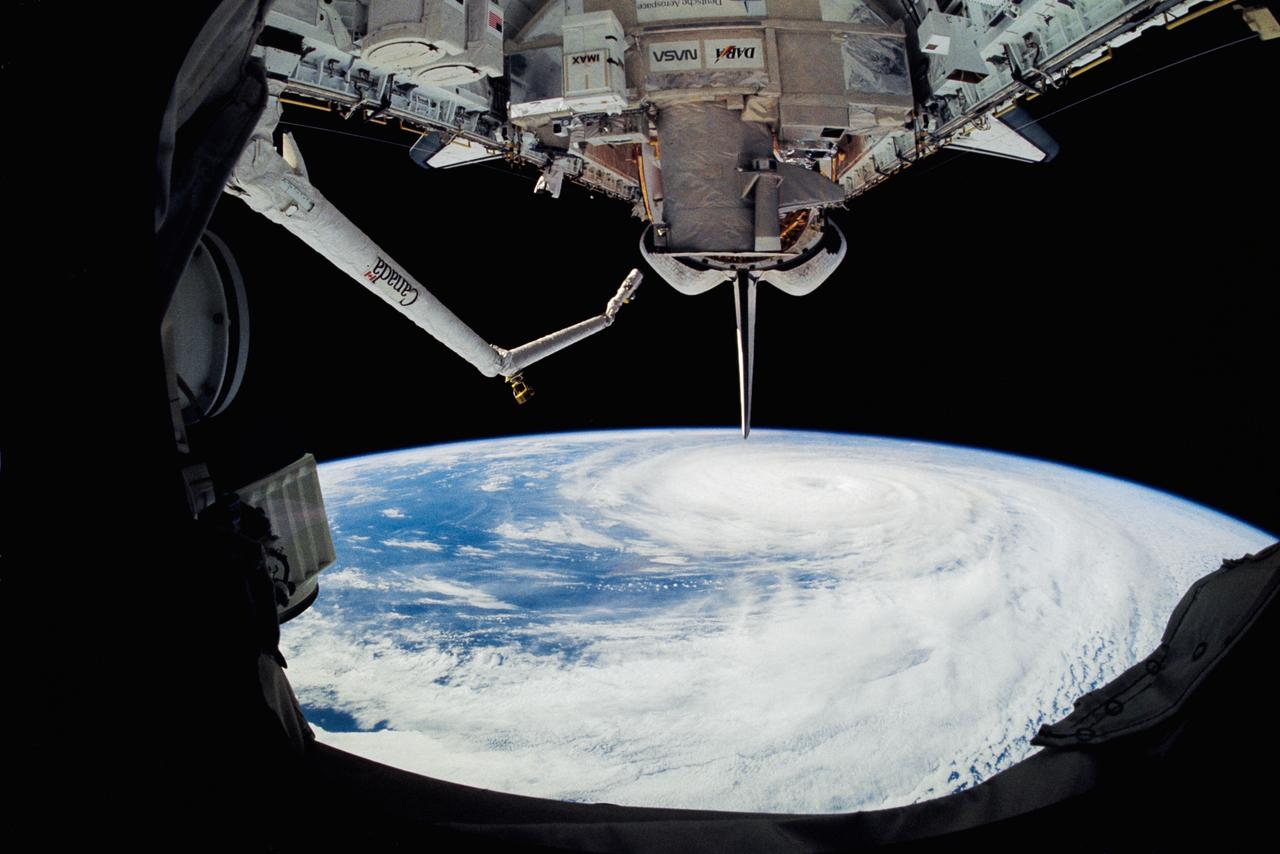
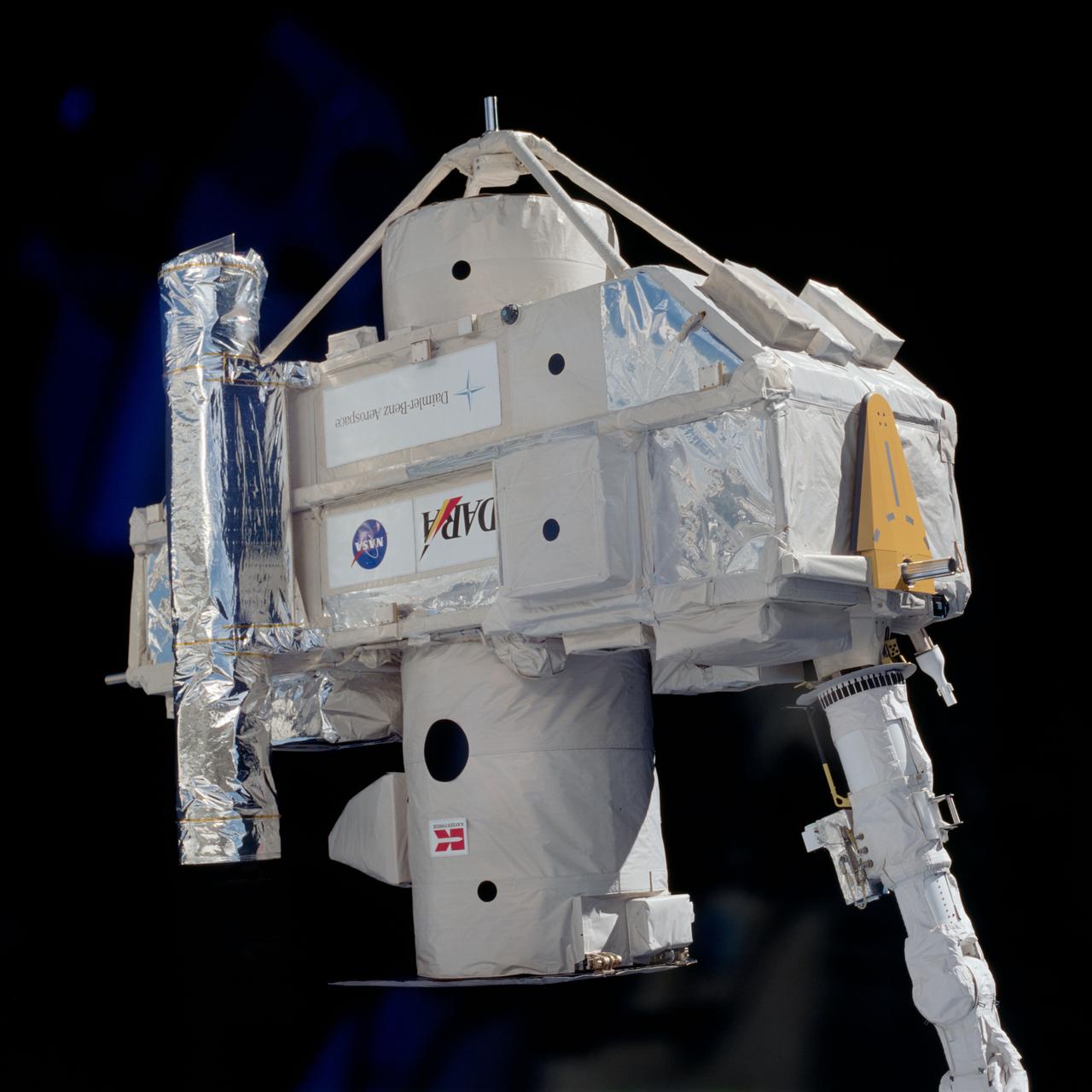
One of the STS-51 astronauts used a "fish-eye" lens on a 35mm cmaera to photograph this view of Hurricane Kenneth in the Pacific Ocean. The Orbiting Retrievable Far and Extreme Ultraviolet Spectrometer/Shuttle Pallet Satellite (ORFEUS/SPAS) is still in the cargo bay. The Remote Manipulator System (RMS) is extended towards the open payload bay.

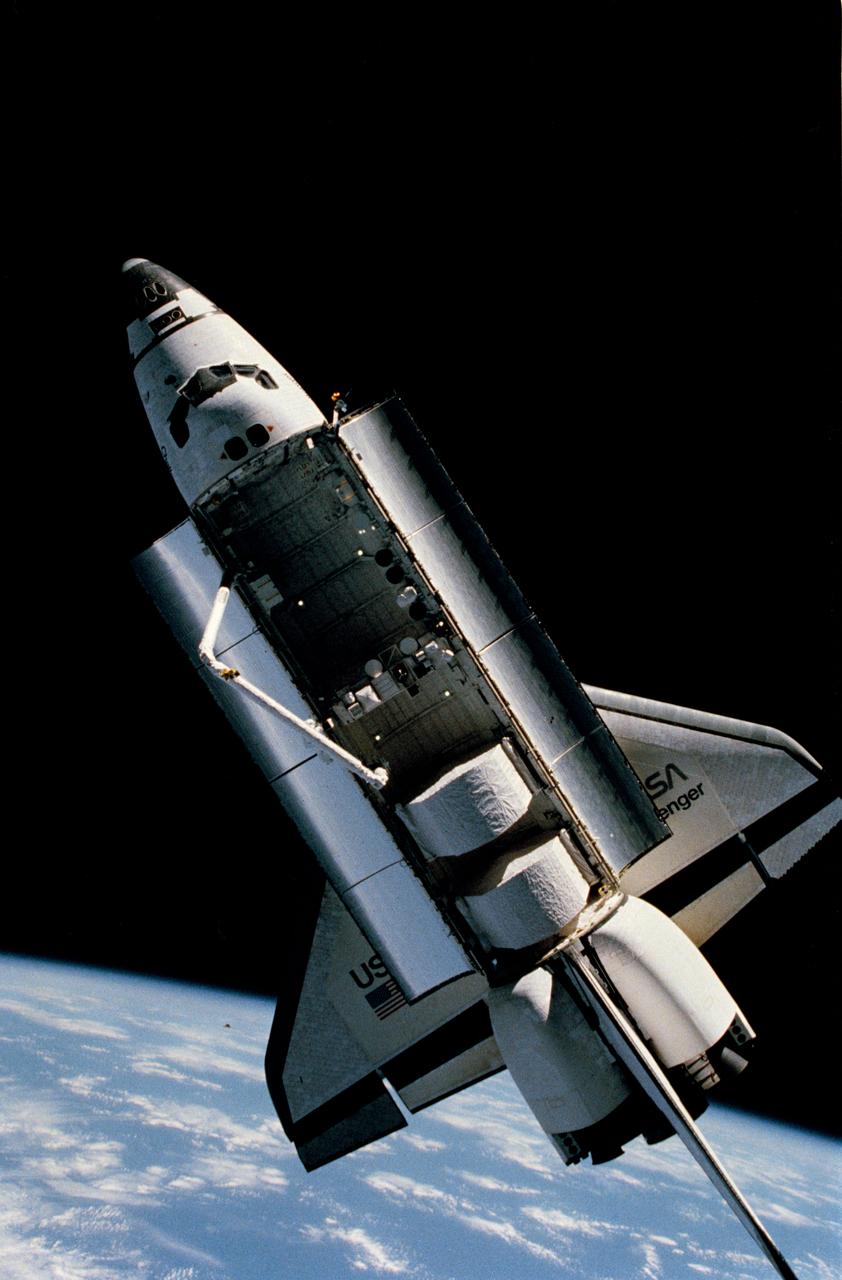
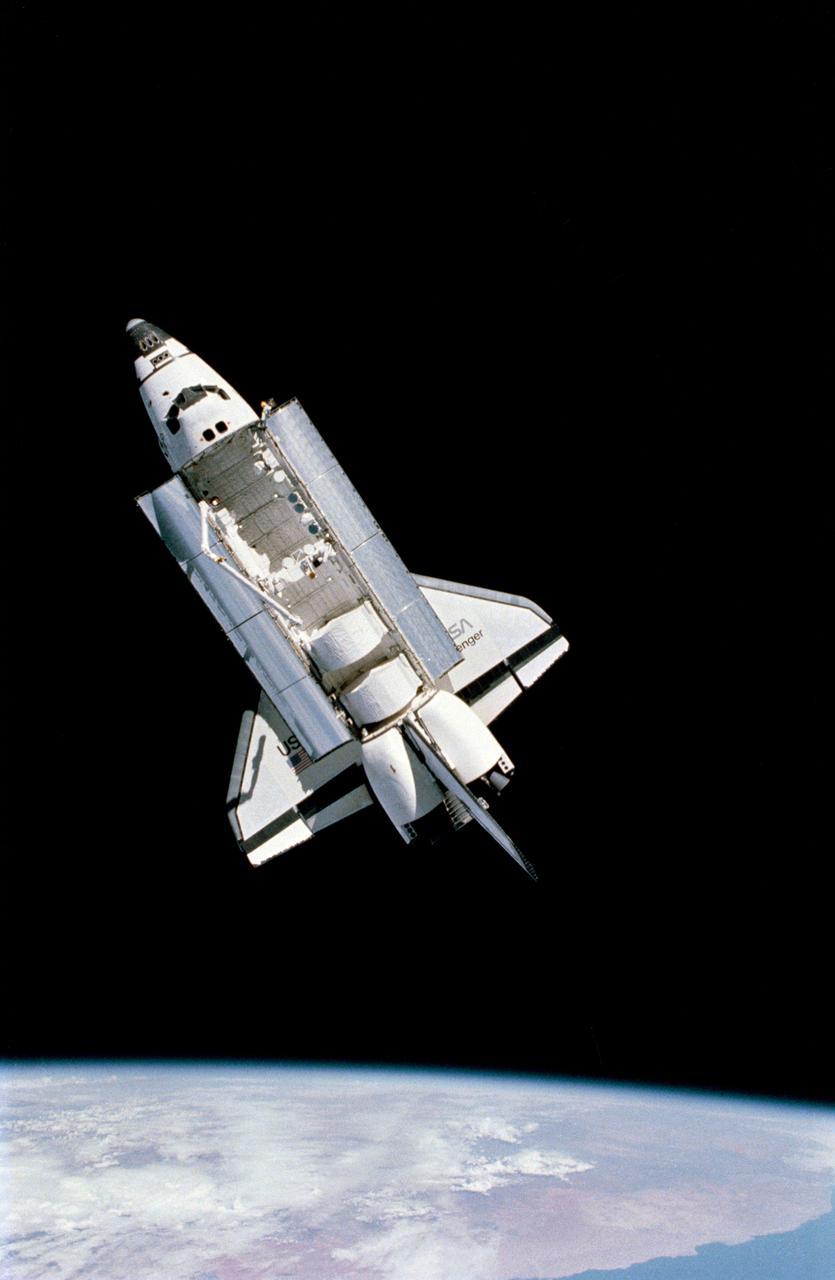
STS007-32-1667 (22 June 1983) --- The Earth-orbiting Space Shuttle Challenger over a heavily cloud-covered portion of the Earth was captured by a 70mm camera onboard the temporarily free-flying Shuttle Pallet Satellite (SPAS-01) during a busy Day 5 on the STS-7 mission. Visible in the cargo bay are the protective cradles for the now vacated Telesat Anik C2 and Palapa-B communications satellites, the pallet for the NASA Office of Space and Terrestrial Applications (OSTA-2); the Remote Manipulator System (RMS) and the KU-Band antenna. The STS-7 astronaut crew and the RMS arm later retrieved the SPAS and returned it to a stowed position in the cargo bay of the Space Shuttle Challenger for the return to Earth.

STS046-102-021 (1 Aug 1992) --- The European Space Agency's (ESA) EURECA satellite remains in the grasp of the Space Shuttle Atlantis' Remote Manipulator System (RMS) as the Space Shuttle passes over the Persian Gulf. Most of the theater of the recent war is visible in the frame. Parts of Kuwait, Iraq, Iran and Saudi Arabia can be delineated. The Tethered Satellite System (TSS) remains stowed in the aft cargo bay of Atlantis.

51I-44-014 (31 Aug-1 Sept. 1985) --- This photograph is one of a series of six covering extravehicular activity (EVA) which were released by NASA on Sept. 4, 1985. Here, astronaut James D. van Hoften, dwarfed by the large satellite, moves in for initial contact. Astronaut John M. (Mike) Lounge, out of frame inside cabin, maneuvers the remote manipulator system (RMS) arm to assist astronauts van Hoften and William F. Fisher. Photo credit: NASA

51A-104-008 (14 Nov 1984) --- Astronaut Dale A. Gardner appears to be under the remote manipulator system (RMS) end effector as he makes a turn in space and prepared to traverse, using the manned maneuvering unit (MMU) backpack, to the nearby Westar VI to "Sting" it with the device he carries. The stringer will enter the communications satellite through the nozzle of the spent motor. Gardner achieved a hard dock at 6:32 A.M. and this picture was photographed about five minutes earlier, on Nov. 14, 1984.

STS039-17-017 (3 May 1990) --- This STS-39 35mm scene shows the Strategic Defense Initiative Organization (SDIO) Shuttle Pallet Satellite (SPAS-II) as it approaches the remote manipulator system (RMS) end effector following a period of free-flight and data collection. During the eight-day flight, SPAS collected data in both a free-flying mode and while attached to the RMS. A huge blanket of white clouds obscures identifiable points on Earth, nearly 300 statute miles away. The target grappling apparatus on SPAS is clearly seen near bottom center of frame.

S83-35782 (18 June 1983) --- An Orbital Maneuvering System (OMS) engine firing caused this bright glow at the aft end of the Earth-orbiting space shuttle Challenger on June 18, 1983. Also visible in the 70mm exposure are parts of the Shuttle Pallet Satellite (SPAS-01). The experiment package for NASA's Office of Space and Terrestrial Applications (OSTA-2), the protective cradles for the Indonesian Palapa-B and Telesat Canada Anik C2 satellites, some getaway special (GAS) canisters and the Canadian-built Remote Manipulator System (RMS). The firing took place less than an hour after deployment of Anik. Photo credit: NASA

51I-41-086 (1 September 1985) --- Astronaut James D. van Hoften, mission specialist, flexes his muscles in celebration of a triumphant extravehicular task. Clouds over the ocean form the backdrop for this 70mm scene, toward the end of a two-day effort to capture, repair and release the previously errant Syncom IV-3 communications satellite. Van Hoften, anchored to a special foot restraint device on the end of Discovery's Remote Manipulator System (RMS), had just performed the final "shove" that started the relative separation of the Shuttle and the Syncom, which is not far out of frame. He had been joined by astronaut William F. Fisher for the busy two days of EVA.

41C-37-1711 (11 April 1984) --- The two mission specialist-EVA participants of Flight 41-C share a repair task at the "captured" Solar Maximum Mission Satellite (SMMS) in the aft end of the Challenger's cargo bay. Astronauts George D. Nelson, right, and James D. van Hoften uses the mobile foot restraint and the Remote Manipulator System (RMS) as a "cherry picker" device for moving about. Later, the RMS lifted the SMMS into space once more.

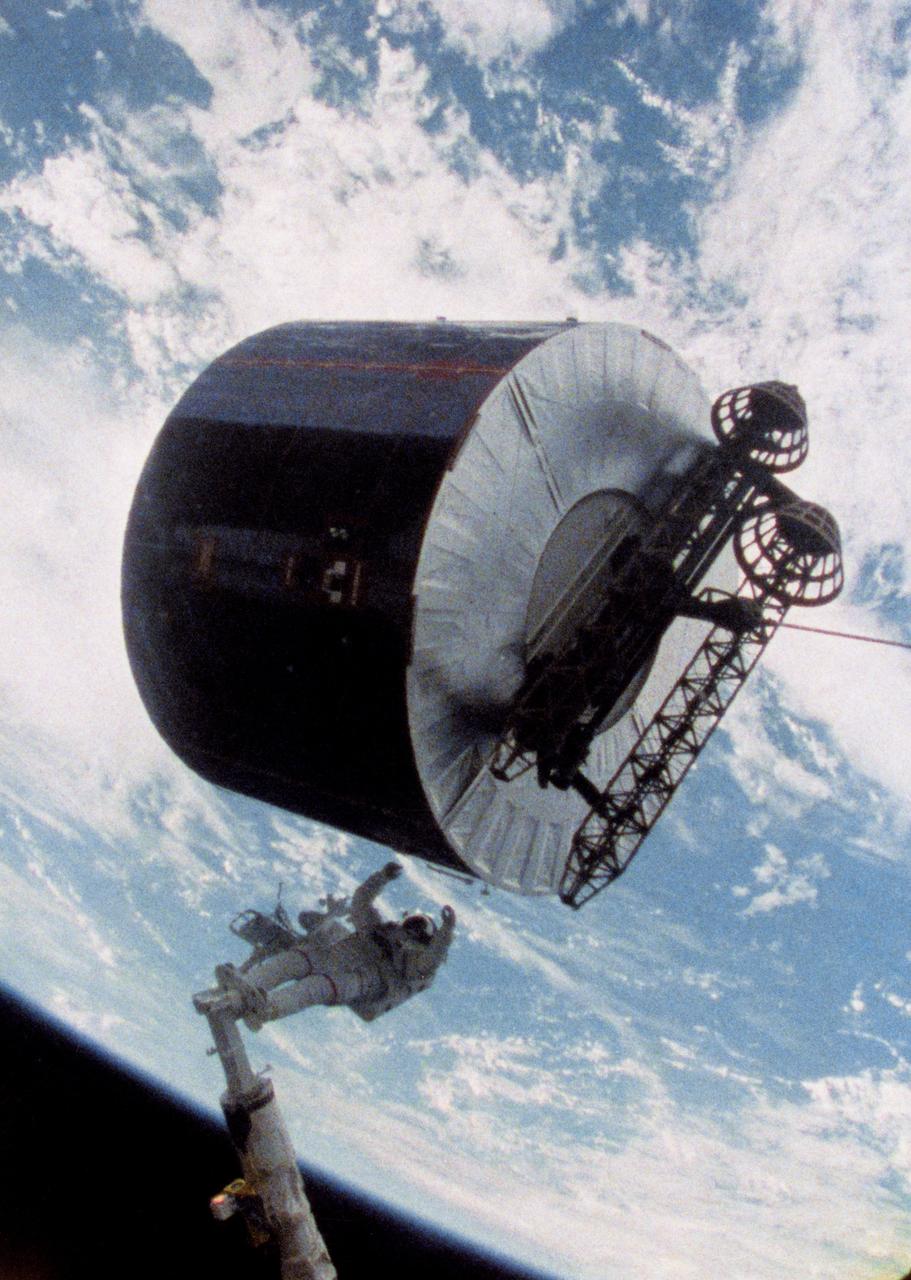
STS049-91-029 (13 May 1992) --- Following the successful capture of Intelsat VI satellite, three astronauts continue their chores toward moving the 4.5 ton communications satellite into the space shuttle Endeavour's cargo bay. A fellow crew member recorded this 70mm still frame from inside Endeavour's cabin. Left to right, astronauts Richard J. Hieb, Thomas D. Akers and Pierre J. Thuot, cooperate on the effort to attach a specially designed grapple bar underneath the satellite. Thuot stands on the end of the Remote Manipulator System's (RMS) arm while Hieb and Akers are on Portable Foot Restraints (PFR) affixed to Endeavour's portside and the Multipurpose Support Structure (MPESS), respectively. The sections of Earth which form the backdrop for the scene are blanketed with thousands of square miles of clouds. Photo credit: NASA
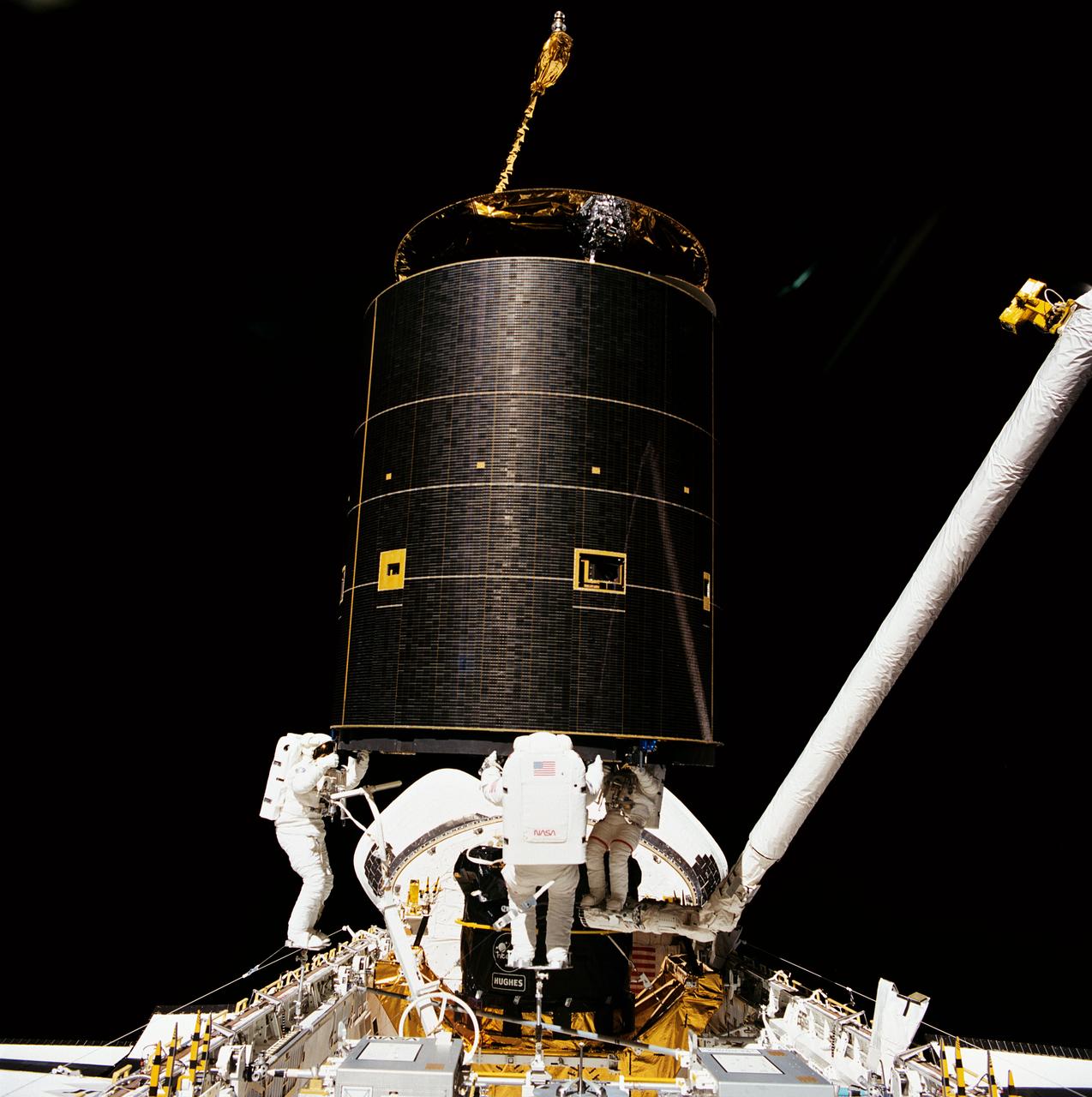
STS049-91-026 (13 May 1992) --- Three astronauts hold onto the 4.5-ton Intelsat VI satellite after a six-handed "capture" was made minutes earlier. Left to right are astronauts Richard J. Hieb, Thomas D. Akers and Pierre J. Thuot. Thuot stands on the end of the remote manipulator system arm, from which he had made two earlier unsuccessful grapple attempts on two-person extravehicular activity sessions. Ground controllers and crew members agreed that a third attempt, using three mission specialists in the cargo bay of the space shuttle Endeavour, was the effort needed to accomplish the capture feat.
S84-27020 (7 Feb 1984) --- A fixed camera on astronaut Bruce McCandless II's helmet recorded this rare scene of the Space Shuttle Challenger some 50 to 60 meters away during a history-making extravehicular activity (EVA), February 7, 1984. The Shuttle Pallet Satellite (SPAS-01A) is configured mid-cargo bay. Astronaut Robert L. Stewart, standing beneath the Remote Manipulator System (RMS) arm, later donned the same Manned Maneuvering Unit (MMU) which afforded McCandless the freedom of movement to record this image. Also visible in the cargo bay are the support stations for the two MMU back-packs, the sunshields for the Palapa B and Westar VI Satellites, KU-Band antenna and a number of Getaway Special (GAS) canisters.

41C-52-2646 (11 April 1984) --- Astronaut James D. van Hoften and a repaired satellite are in a wide panorama recorded on film with a Linhof camera, making its initial flight aboard the Space Shuttle Challenger. Dr. van Hoften is getting in his first "field" test of the Manned Maneuvering Unit (MMU) after months of training in an underwater facility and in a simulator on Earth. The Solar Maximum Mission Satellite (SMMS), revived and almost ready for release into space once more, is docked at the Flight Support System (FSS). The Remote Manipulator System (RMS) is backdropped against the blue and white Earth at frame's edge. Outside of pictures made of the Earth from astronauts on the way to the Moon, this frame showing the planet from 285 nautical miles represents the highest orbital photography in the manned space program.

iss050e017076 (12/19/2016) --- A view after Japanese Experiment Module Remote Manipulator System (JEMRMS) Small Satellite Deployment called Space Tethered Autonomous Robotic satellite (STARS-C).

Full views of "Challenger" in Space, taken by the Shuttle Pallet Satellite (SPAS), also views of Cargo Bay and Remote Manipulator System (RMS) extended. 1. SHUTTLE - RMS (STS-7) Also available in 4x5 CN

Full views of "Challenger" in Space, taken by the Shuttle Pallet Satellite (SPAS), also views of Cargo Bay and Remote Manipulator System (RMS) extended. 1. SHUTTLE - RMS (STS-7) Also available in 4x5 CN
Full views of "Challenger" in Space, taken by the Shuttle Pallet Satellite (SPAS), also views of Cargo Bay and Remote Manipulator System (RMS) extended. 1. SHUTTLE - RMS (STS-7) Also available in 4x5 CN

STS072-726-051 (15 Jan. 1996) --- The Office of Aeronautics and Space Technology (OAST) Flyer satellite begins its period of free flight, as it is let go by the end effector of the Space Shuttle Endeavour's Remote Manipulator System (RMS). The crewmembers retrieved the satellite two days later.

iss042e016906 (11/28/2014) --- The Space Station Integrated Kinetic Launcher for Orbital Payload Systems (SSIKLOPS), or Cyclops, launch platform with Special Purpose Inexpensive Satellite (SpinSat) attached is grappled by the Japanese Experiment Module Remote Manipulator System (JEMRMS) small fine Arm (SFA) in preparation for the release of SpinSat.
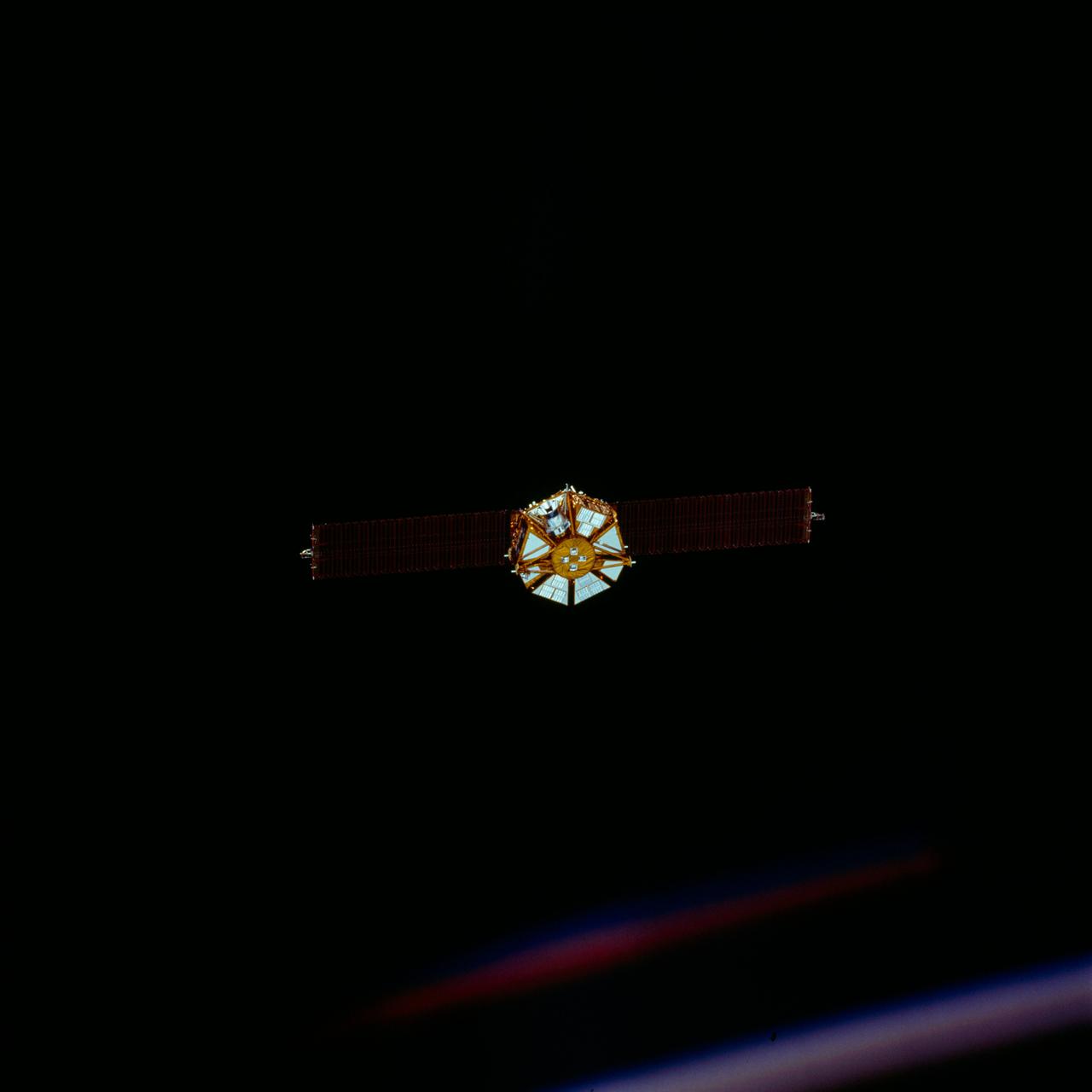
STS072-720-042 (13 Jan. 1996) --- The crew members captured this 70mm view of the Japanese Space Flyer Unit (SFU) just prior to the jettisoning of the solar panels. Later, they used the Remote Manipulator System (RMS) to latch onto the satellite and berth it in the Space Shuttle Endeavour’s aft cargo bay.
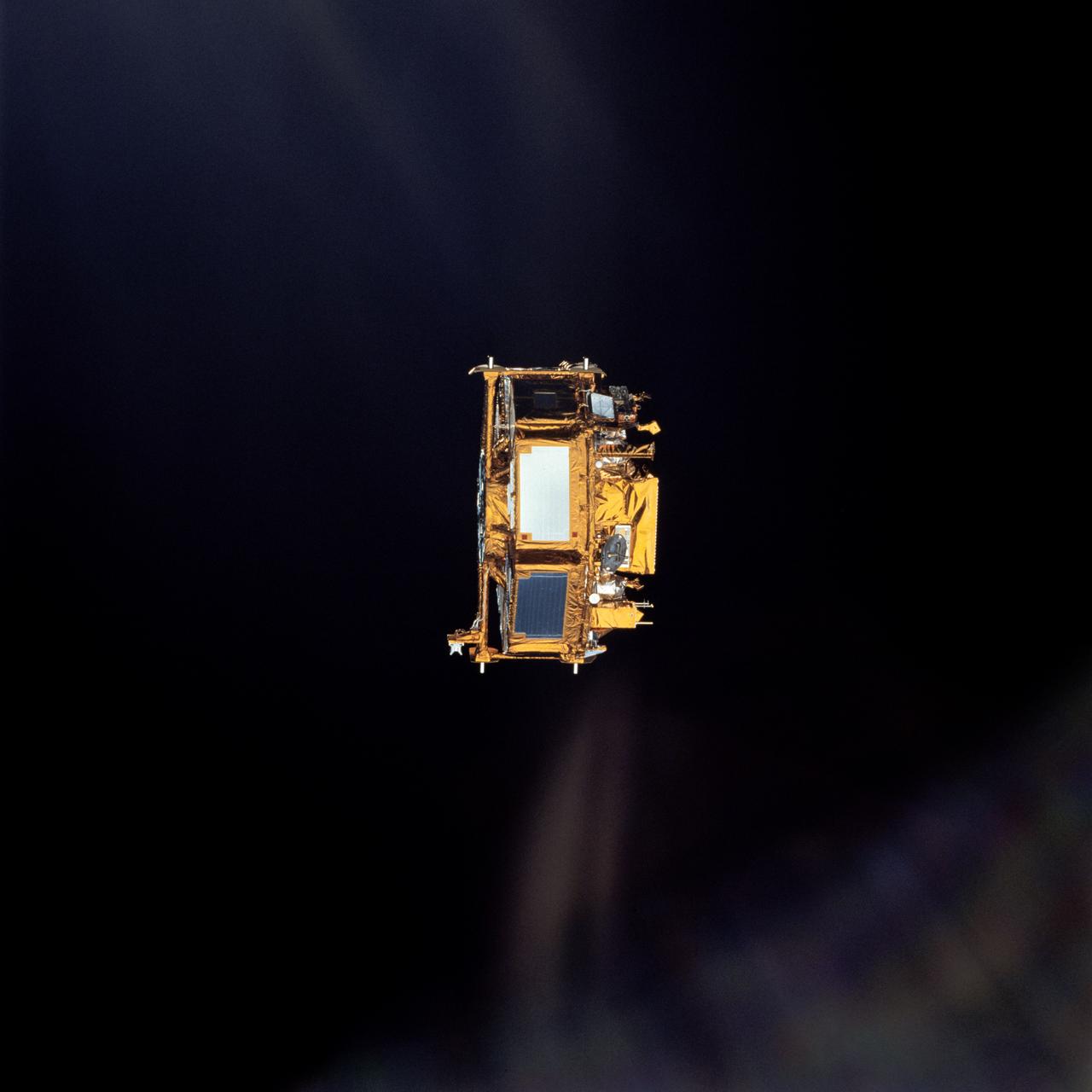
STS072-720-076 (13 Jan. 1996) --- The crewmembers captured this 35mm view of the Japanese Space Flyer Unit (SFU) following the jettisoning of the solar panels. Later they used the Remote Manipulator System (RMS) to latch onto the satellite and berth it in the Space Shuttle Endeavour's aft cargo bay.
STS080-704-008 (19 Nov.-7 Dec. 1996) --- Backdropped against the blackness of space, the ORPHEUS - Shuttle Pallet Satellite (SPAS) spacecraft is held in the grasp of the space shuttle Columbia's Remote Manipulator System (RMS) during deploy operations in Earth-orbit.
STS072-320-014 (17 Jan. 1996) --- The end effect of the Space Shuttle Endeavour's Remote Manipulator System (RMS) is about to grapple the Office of Aeronautics and Space Technology's (OAST) -- Flyer satellite. The view was recorded with a 35mm camera aimed through one of Endeavour's overheard windows on the aft flight deck.

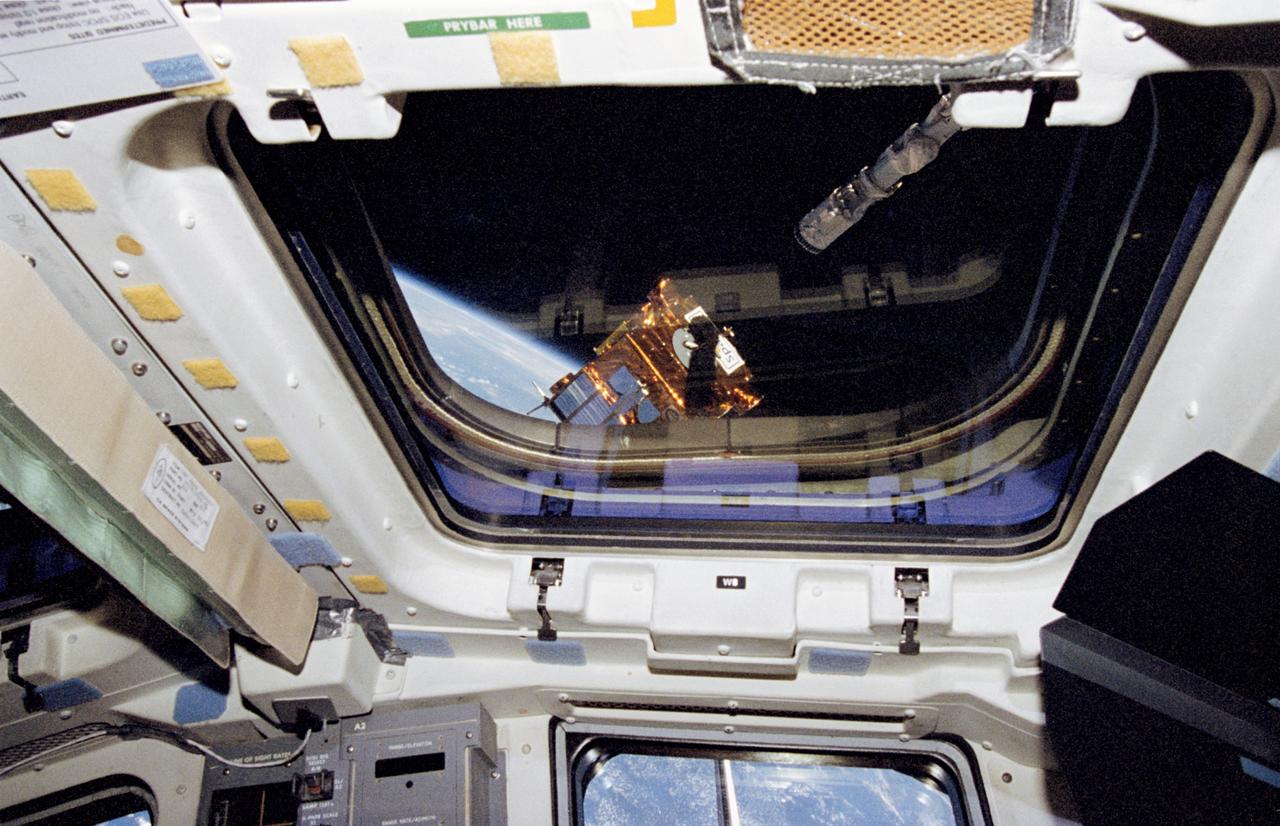
STS072-734-011 (11 Jan. 1996) --- The crewmembers captured this 35mm view of the Japanese Space Flyer Unit (SFU) during its berthing with the Remote Manipulator System (RMS). Yet to be deployed is the Office of Aeronautics and Space Technology (OAST) Flyer satellite, seen at bottom center.

S85-E-5104 (15 August 1997) --- CRISTA-SPAS-2 appears "next" to a colorful pole, which is actually the atmosphere above Earth. Moments later, the previously free-flying satellite was in the grasp of Discovery's remote manipulator system (RMS).

51D-07-003 (12-19 April 1985) --- Astronaut Rhea Seddon begins early work on a fly swatter-like snagging device to be used as an extension to the Remote Manipulator System (RMS) arm on Discovery for an April 17, 1985 attempt to trip a lever on the troubled Syncom-IV satellite.

S85-E-5096 (15 August 1997) --- The Cryogenic Infrared Spectrometers and Telescopes for the Atmosphere-Shuttle Pallet Satellite-2 (CRISTA-SPAS-2) payload is backdropped against the darkness of space prior to its retrieval by Discovery's remote manipulator system (RMS) on Aug. 16.

The patch features a helmet visor of an astronaut performing an extravehicular activity. In the visor are reflected the sun's rays, the Challenger and its remote manipulator system (RMS) deploying the long duration exposure facility (LDEF), the Earth and blue sky, and another astronaut working at the damaged Solar Maximum Satellite (SMS). The scene is encircled by the surnames of the crewmembers.
STS095-E-5139 (3 Nov. 1998) --- In the grasp of Discovery's remote manipulator system (RMS) arm, the Spartan 201-05 satellite hovers over the cargo bay prior to its berthing there. The photo was taken with an electronic still camera (ESC) at 03:59:12 GMT, Nov. 3.

STS064-111-041 (12 Sept. 1994) ---- Backdropped against New England's coast, the Shuttle Pointed Autonomous Research Tool for Astronomy (SPARTAN-201) satellite begins its separation from the space shuttle Discovery. The free-flying spacecraft, 130 nautical miles above Cape Cod at frame center, remained some 40 miles away from Discovery until the crew retrieved it two days later. Photo credit: NASA or National Aeronautics and Space Administration
STS046-08-010 (1 Aug 1992) --- The EURECA satellite is hoisted above the Space Shuttle Atlantis' cargo bay by the Remote Manipulator System (RMS) during early mission activity aboard the Earth-orbiting Shuttle. A 16mm lens gives this 35mm frame a "fish-eye" effect. The Tethered Satellite System (TSS), center frame, is stowed in the cargo bay, where it awaits extensive operations by the seven-member crew.
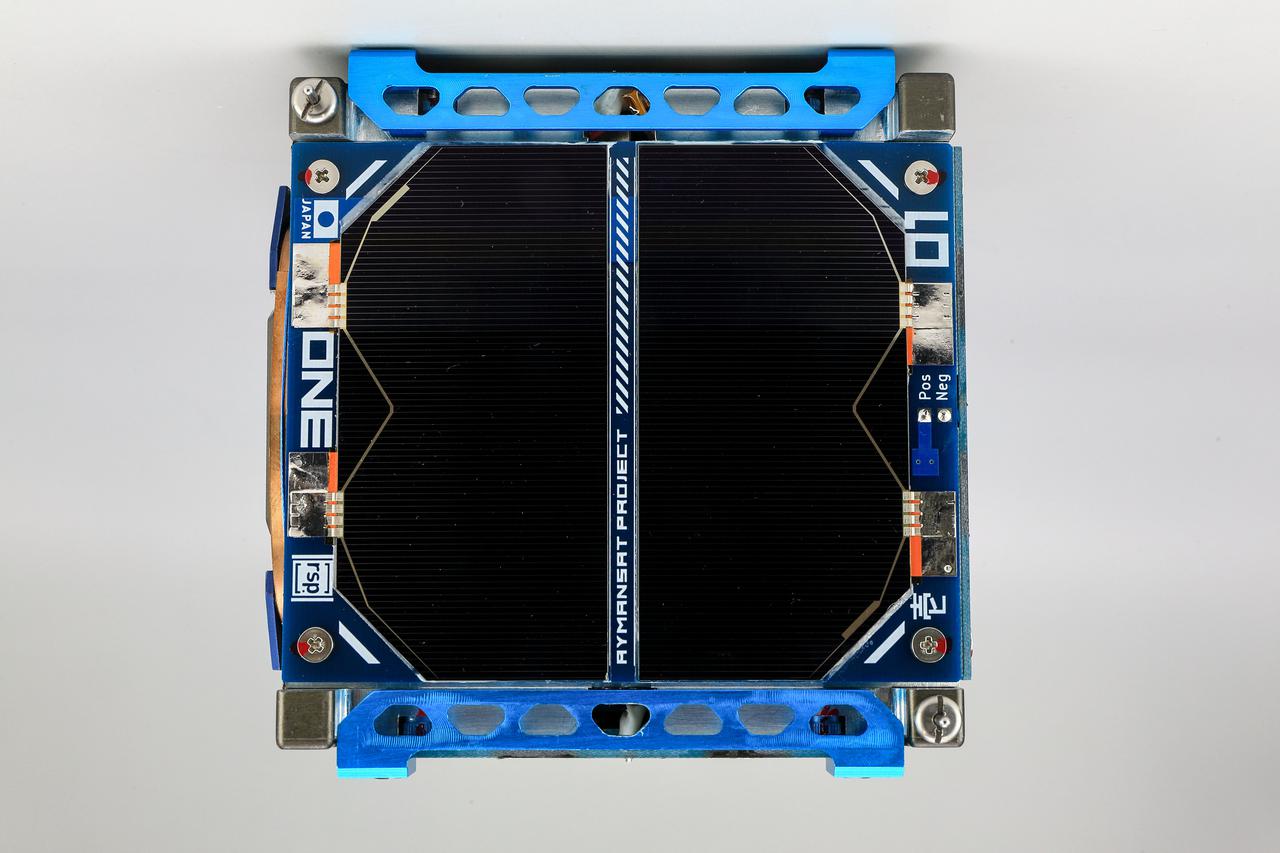
jsc2021e004420 (10/3/2020) --- A pre-flight view of the top of the RSP-01 Flight Model. The RSP-01 satellite is a 1-Unit (1U) CubeSat that deploys during the JEM Small Satellite Orbital Deployer-16 (J-SSOD-16) micro-satellite deployment mission and is handled by the Japanese Experiment Module Remote Manipulator System (JEMRMS). RSP-01 is developed by Rymansat Spaces and launches to the International Space Station aboard the NG-15 Cygnus Cargo Vehicle. Image Credit: Rymansat Spaces.
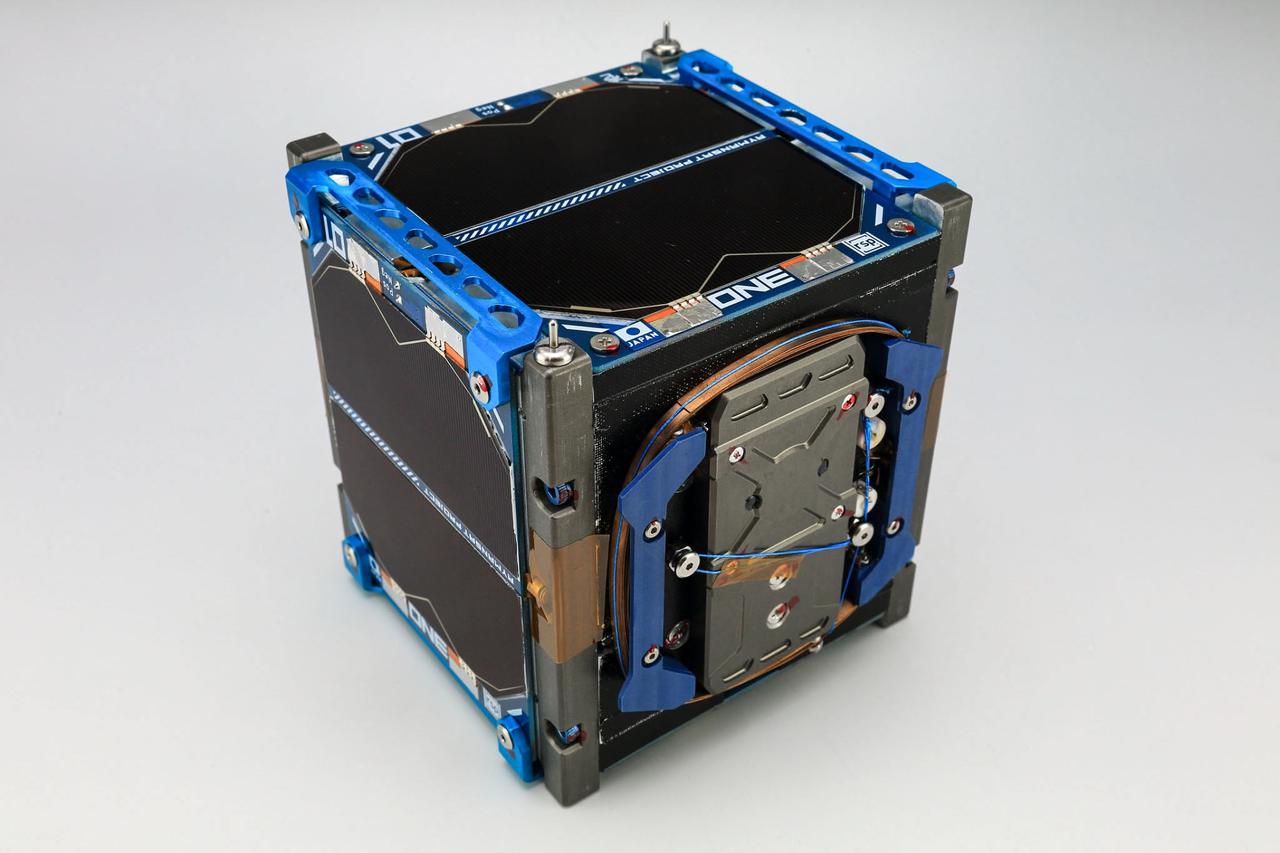
jsc2021e004417 (10/6/2020) --- A pre-flight view of the RSP-01 Flight Model. The RSP-01 satellite is a 1-Unit (1U) CubeSat that deploys during the JEM Small Satellite Orbital Deployer-16 (J-SSOD-16) micro-satellite deployment mission and is handled by the Japanese Experiment Module Remote Manipulator System (JEMRMS). RSP-01 is developed by Rymansat Spaces and launches to the International Space Station aboard the NG-15 Cygnus Cargo Vehicle. Image Credit: Rymansat Spaces.
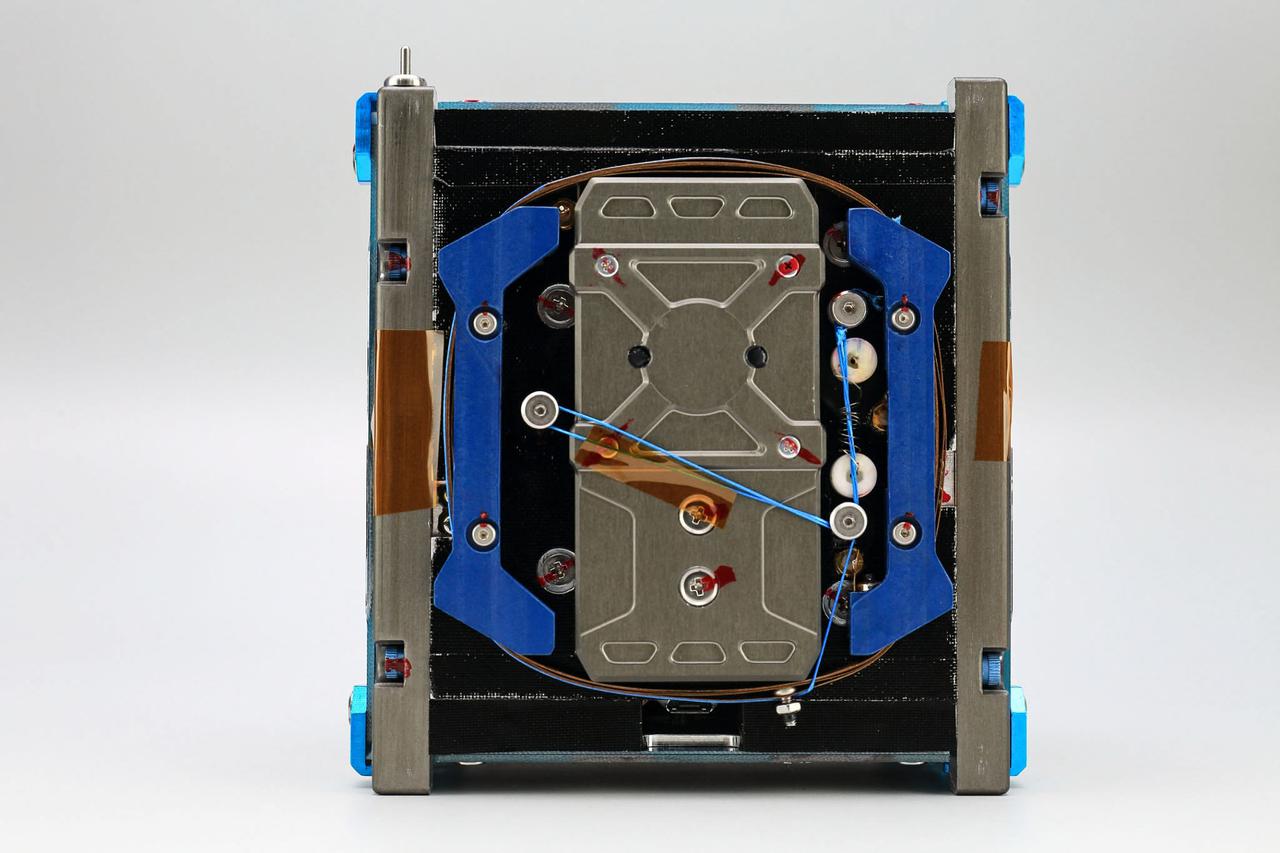
jsc2021e004418 (10/6/2020) --- A pre-flight view of the front side of the RSP-01 Flight Model. The RSP-01 satellite is a 1-Unit (1U) CubeSat that deploys during the JEM Small Satellite Orbital Deployer-16 (J-SSOD-16) micro-satellite deployment mission and is handled by the Japanese Experiment Module Remote Manipulator System (JEMRMS). RSP-01 is developed by Rymansat Spaces and launches to the International Space Station aboard the NG-15 Cygnus Cargo Vehicle. Image Credit: Rymansat Spaces.

jsc2021e004419 (10/27/2020) --- A pre-flight view of the RSP-01 Robot Arm Deployment. The RSP-01 satellite is a 1-Unit (1U) CubeSat that deploys during the JEM Small Satellite Orbital Deployer-16 (J-SSOD-16) micro-satellite deployment mission and is handled by the Japanese Experiment Module Remote Manipulator System (JEMRMS). RSP-01 is developed by Rymansat Spaces and launches to the International Space Station aboard the NG-15 Cygnus Cargo Vehicle. Image Credit: Rymansat Spaces.

Astronauts are clowning around in space in this STS-51A onboard photo. Astronaut Gardner, holds a “For Sale” sign after the retrieval of two malfunctioning satellites; the Western Union Telegraph Communication Satellite (WESTAR VI); and the PALAPA-B2 Satellite. Astronaut Allen, who is standing on the RMS (Remote Manipulator System) is reflected in Gardner’s helmet visor. The 51A mission launched aboard the Space Shuttle Discovery on November 8, 1984.

Astronauts are clowning around in space in this STS-51A onboard photo. Astronaut Gardner, holds a “For Sale” sign after the retrieval of two malfunctioning satellites; the Western Union Telegraph Communication Satellite (WESTAR VI); and the PALAPA-B2 Satellite. Astronaut Allen, who is standing on the Remote Manipulator System (RMS) is reflected in Gardner’s helmet visor. The 51A mission launched aboard the Space Shuttle Discovery on November 8, 1984.

Spartan I satellte sits in the Discovery's payload bay prior to being deployed. Above it can be seen the remote manipulator system (RMS) arm and end effector. The Earth's horizon can also be seen above the orbiter.

iss050e031207 (1/6/2017) --- A view during the Japanese-Small Satellite Orbital Deployer-6 (J-SSOD-6) deployment of the following satellites: Freedom (1U), Waseda-SAT3, ITF-2 (1U), Egg (3U), AOBA-Velox-III (U), TuPOD (3U). J-SSOD is a unique satellite launcher, handled by the Japanese Experiment Module Remote Manipulator System (JEMRMS), which provides containment and deployment mechanisms for several individual small satellites. Once the J-SSOD including satellite install cases with small satellites are installed on the Multi-Purpose Experiment Platform (MPEP) by crewmembers, it is passed through the JEM airlock for retrieval, positioning and deployment by the JEMRMS.

STS051-15-035 (19 Sept 1993) --- Backdropped against black space and the blue and white Earth, the Orbiting Retrievable Far and Extreme Ultraviolet Spectrometer (ORFEUS) and its Shuttle Pallet Satellite (SPAS) are pictured during berthing in Discovery's cargo bay. The free-flying craft had spent several days orbiting at a distance from Discovery with several experiments in operation. Here, the satellite is still in the grasp of the Canadian-built Remote Manipulator System (RMS), which was used also for the earlier deployment.

STS096-707-039 (5 June 1999) --- The Student-Tracked Atmospheric Research Satellite for Heuristic International Networking Experiment (STARSHINE) satellite leaves the cargo bay of the Space Shuttle Discovery near the completion of the almost ten-day STS-96 mission. SpaceHab, the stowed Canadian-built remote manipulator system (RMS) arm and the shuttle's docking mechanism which earlier was connected to the International Space Station (ISS) are all visible in the foreground.
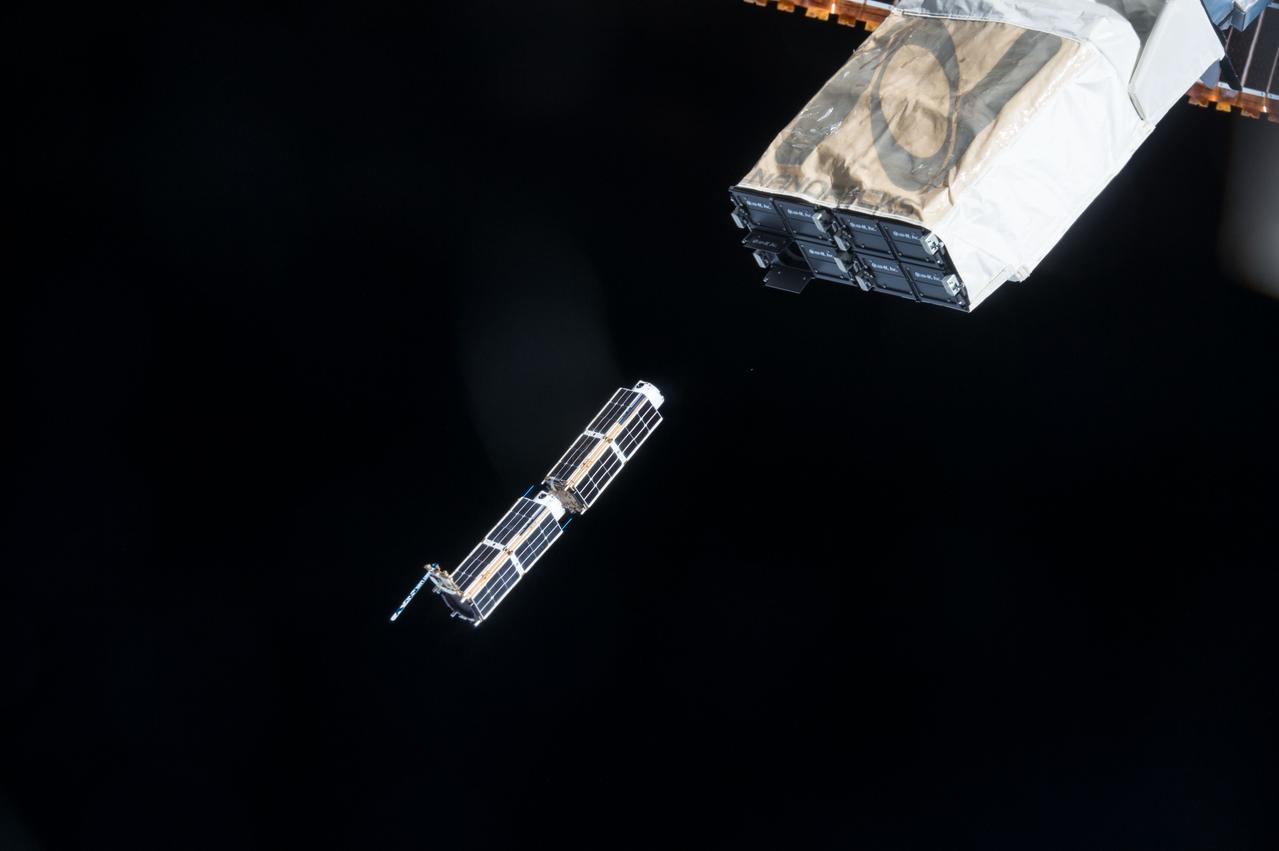
iss071e006845 (4/10/2024) --- View of the Japanese Experiment Module (JEM) Small Satellite Orbital Deployer-28 (J-SSOD-28) attached to the JEM Remote Manipulator System on the JEM Exposed Facility with the CURTIS experiment inside the deployer during Expedition 71. CURTIS is a 3U size satellite created through joint research between Panasonic HD and Kyutech. CURTIS carries out four different mission objectives to demonstrate technologies that can be used in future CubeSats.

STS085-722-087 (7 - 19 August 1997) --- The Cryogenic Infrared Spectrometers and Telescopes for the Atmosphere-Shuttle Pallet Satellite-2 (CRISTA-SPAS-2) having just been grappled by the Space Shuttle Discovery's Remote Manipulator System (RMS), is backdropped against Puget Sound and the Seattle, Washington area. A short while later, the satellite was re-berthed in the cargo bay, silhouetted in this 70mm frame. This image was exposed through the aft flight deck windows of Discovery.

STS077-312-015 (19-29 May 1996) --- Astronaut Curtis L. Brown, Jr., pilot, mans the controls for the Remote Manipulator System (RMS) on the Space Shuttle Endeavour?s aft flight deck during rendezvous operations. During the flight, the six-member crew was involved in deployment and rendezvous operations with the Spartan 207/Inflatable Antenna Experiment (IAE) as well as the Passive Aerodynamically Stabilized Magnetically Damped Satellite (PAMS)/Satellite Test Unit (STU).
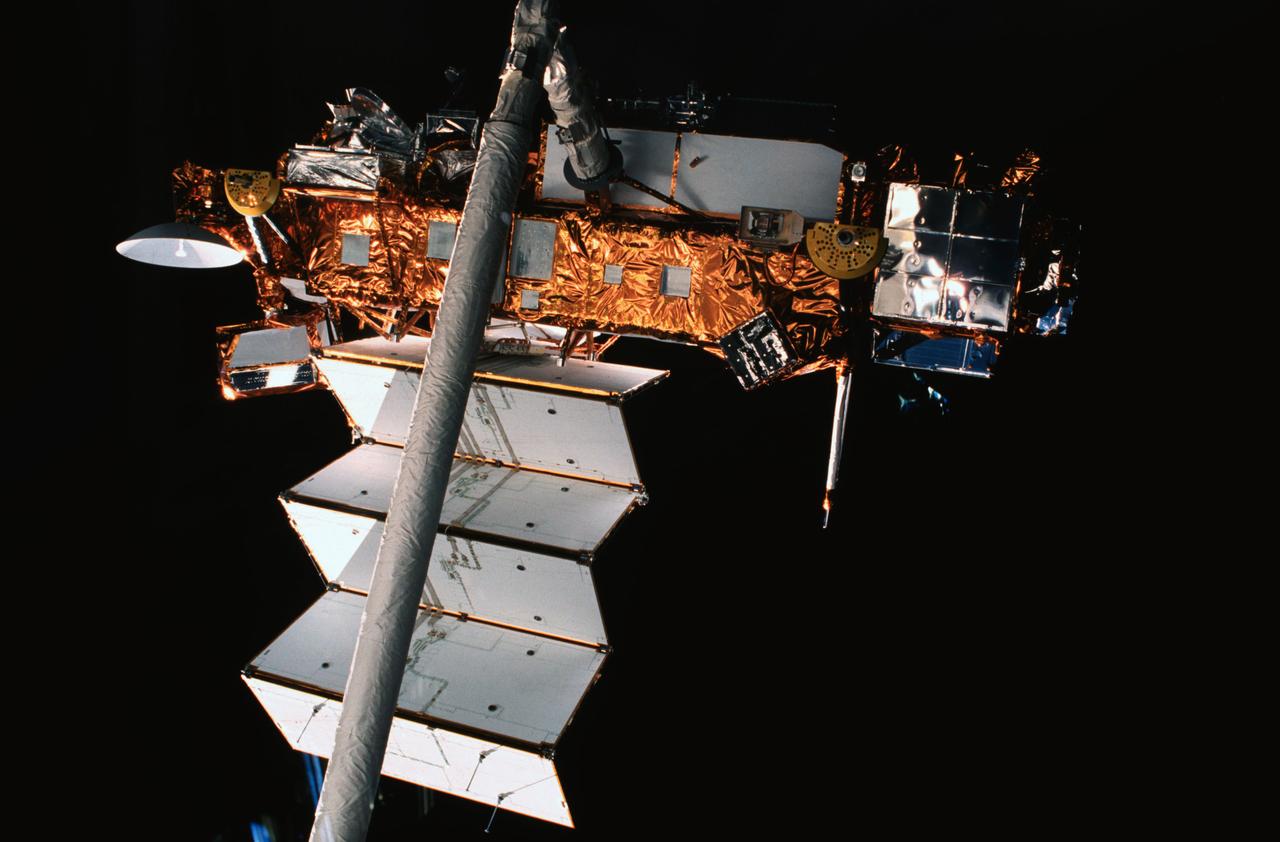
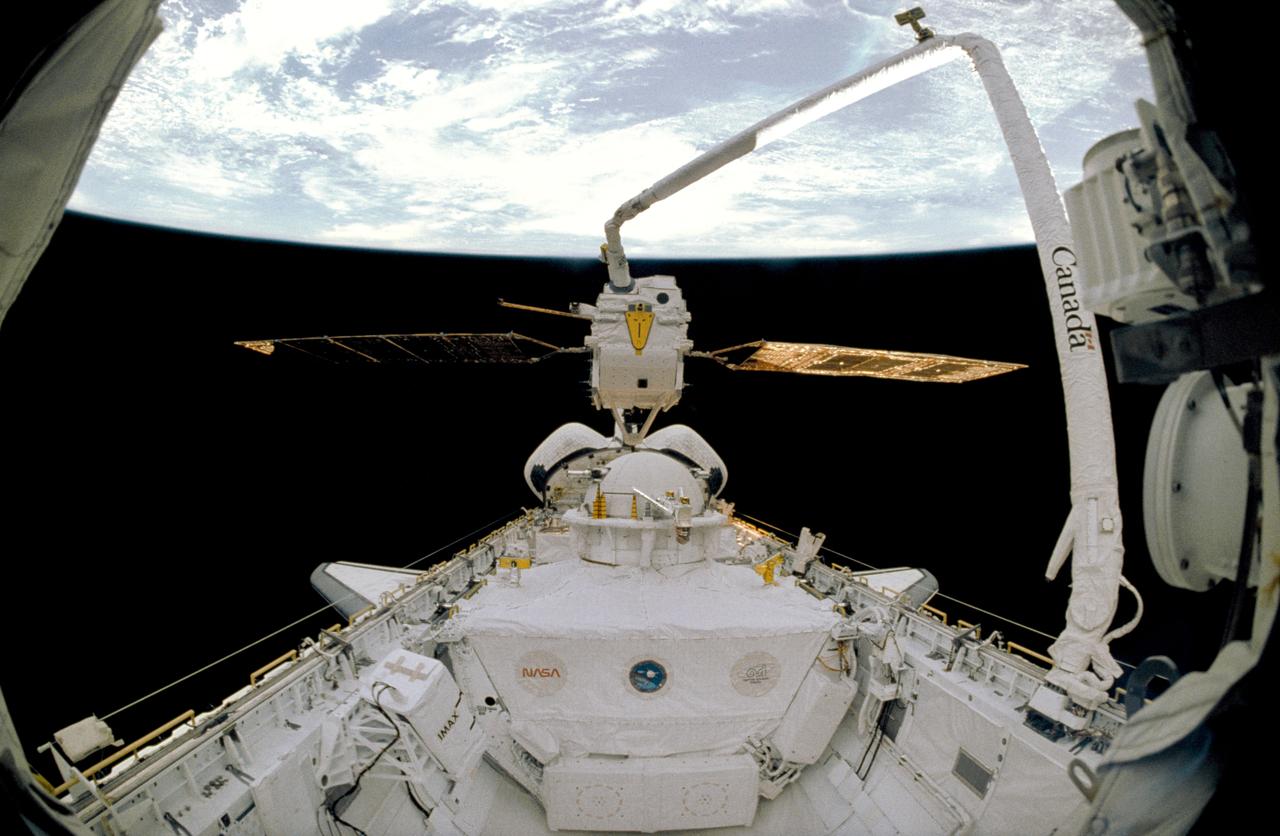
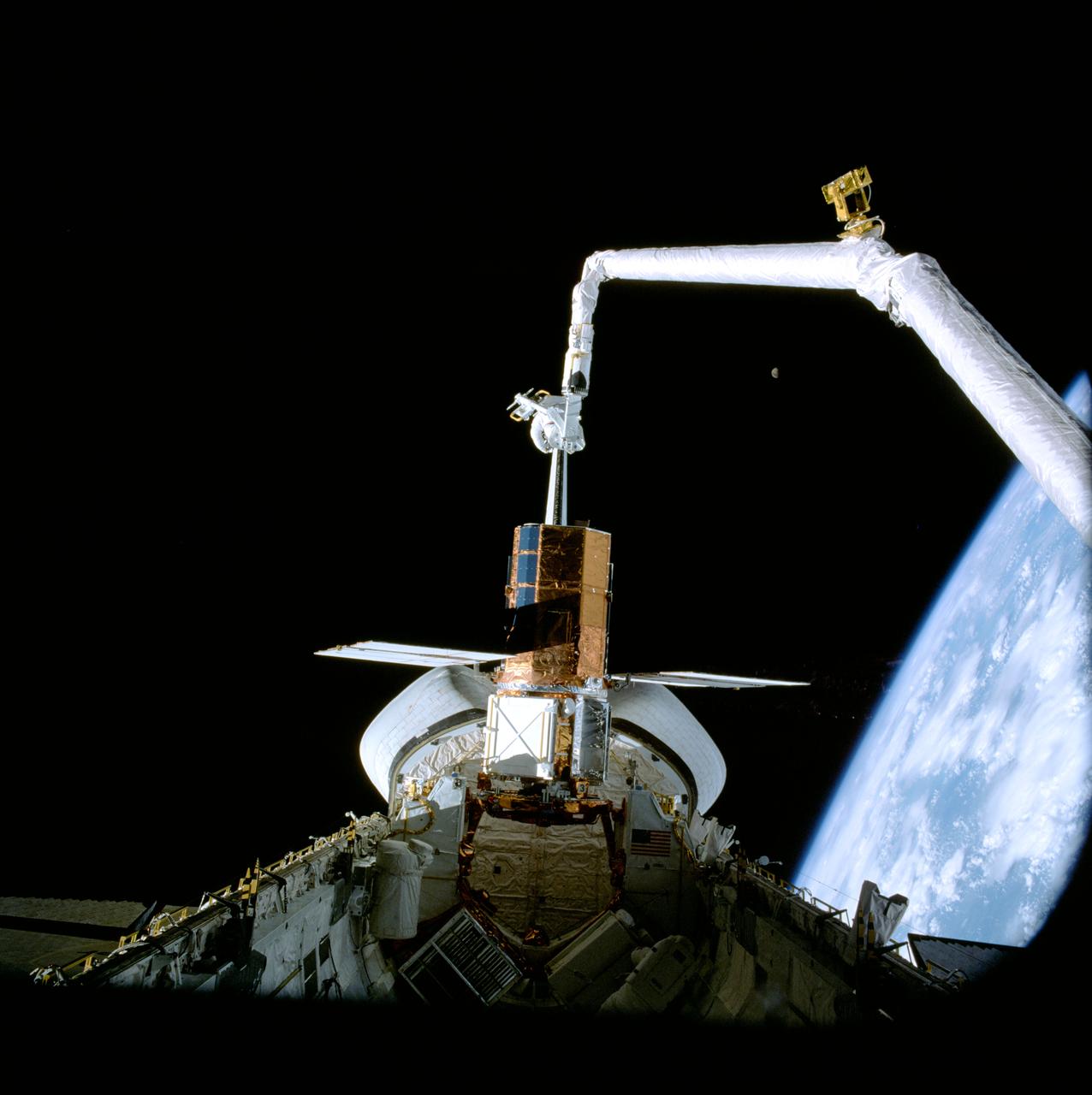
STS048-05-024 (15 Sept 1991) --- The Upper Atmosphere Research Satellite (UARS), in the grasp of the Remote Manipulator System (RMS), was captured on film by a camera aimed through one of the Space Shuttle Discovery's overhead windows. At the time of the photo, deployment of UARS' solar array panel was in progress. A few hours later, the huge satellite was free and on its way to a higher orbit. Data from UARS will enable scientists to study ozone depletion in the stratosphere, or upper atmosphere. The image was photographed with a 35mm camera.

STS-49, the first flight of the Space Shuttle Orbiter Endeavour, lifted off from launch pad 39B on May 7, 1992 at 6:40 pm CDT. The STS-49 mission was the first U.S. orbital flight to feature 4 extravehicular activities (EVAs), and the first flight to involve 3 crew members working simultaneously outside of the spacecraft. The primary objective was the capture and redeployment of the INTELSAT VI (F-3), a communication satellite for the International Telecommunication Satellite organization, which was stranded in an unusable orbit since its launch aboard the Titan rocket in March 1990. After securing the satellite with the Remote Manipulator System (RMS), the crew proceeded with preparing the satellite for its release into space.
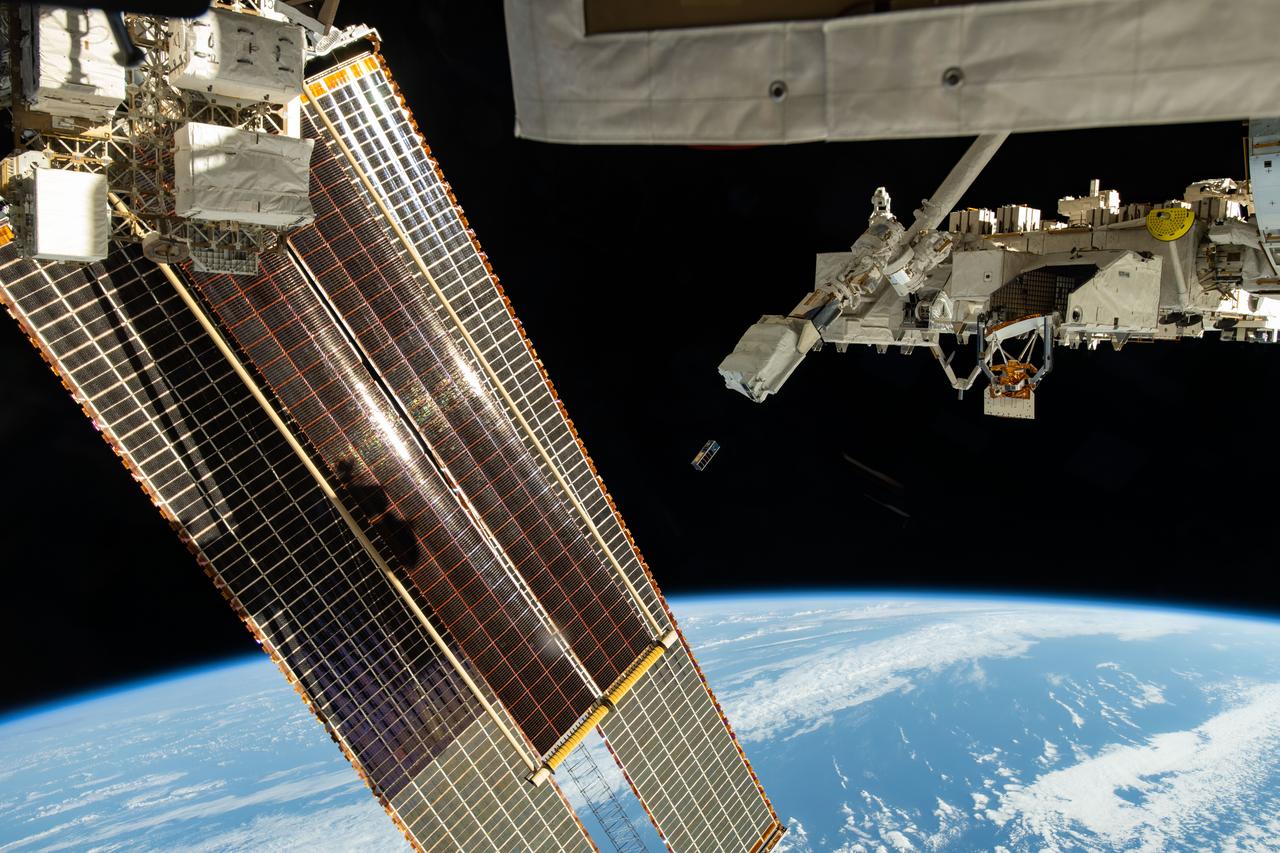
ISS042E290579 (02/27/2015) --- On Feb. 27 2015, a series of CubeSats, small experimental satellites, were deployed via a special device mounted on the Japanese Experiment Module (JEM) Remote Manipulator System (JEMRMS). Deployed satellites included twelve Dove sats, one TechEdSat-4, one GEARRSat, one LambdaSat, one MicroMas. These satellites perform a variety of functions from capturing new Earth imagery, to using microwave scanners to create 3D images of hurricanes, to even developing new methods for returning science samples back to Earth from space. The small satellites were deployed through the first week in March.
S83-35764 (19 June 1983) --- The Indonesian Palapa B communications satellite is just about to clear the vertical stabilizer of the Earth-orbiting Space Shuttle Challenger to begin its way toward its Earth-orbital destination. Also visible in this 70mm exposure, photographed through the flight deck?s aft windows, are the Shuttle pallet satellite, the experiment package for NASA?s office of space and terrestrial applications (OSTA-2), the now vacated protective cradles for Palapa and Telesat Canada?s Anik C2 satellites, some getaway special (GAS) canisters and the Canadian-built remote manipulator system (RMS) arm.

STS072-722-041 (17 Jan. 1996) --- Astronaut Winston E. Scott traverses the portside of the Space Shuttle Endeavour's cargo bay during the second of two Extravehicular Activities (EVA) to demonstrate space station assembly techniques. A 30mm lens on a 70mm handheld camera gives a "fish-eye" effect to the scene. Both the Japanese Space Flyer Unit (SFU) and the Office of Aeronautics and Space Technology (OAST) Flyer satellite are in their stowed positions. TV cameras on the Remote Manipulator System (RMS) provided live coverage of the activity.

STS048-31-002 (15 Sept 1991) --- The Upper Atmosphere Research Satellite (UARS) separates from the Remote Manipulator System (RMS) and begins to move away from the payload bay of the Earth-orbiting Space Shuttle Discovery. Data from UARS will enable scientists to study ozone depletion in the stratosphere, or upper atmosphere. The image was photographed with a 35mm camera.

STS087-706-020 (19 November – 5 December 1997) --- The Spartan 201 satellite, held in the grasp of the Space Shuttle Columbia's Remote Manipulator System (RMS) arm, is backdropped over white clouds and blue waters of the Pacific Ocean. Long Island, off the coast of Papua New Guinea, is barely visible in the lower left corner.

STS095-E-5138 (3 Nov. 2998) --- Astronaut Stephen K. Robinson, STS-95 mission specialist, at the controls of Discovery's remote manipulator system (RMS) robot arm. The Spartan 201-05 satellite can be seen in the grasp of the RMS at left. The photo was taken with an electronic still camera (ESC) at 03:55:25 GMT, Nov. 3.

STS095-E-5082 (1 Nov. 1998) --- Backdropped against the blackness of space, Spartan 201-05 leaves the cargo bay of the Space Shuttle Discovery. The satellite will remain a free-flyer for several days while it records data on the solar wind and the sun's corona. This data is hoped to increase knowledge of the sun's effect on our planet. The Canadian-built remote manipulator system (RMS)is partially visible in the frame. The photograph was taken with an electronic still camera (ESC) at 2:10:31 GMT, November 1.

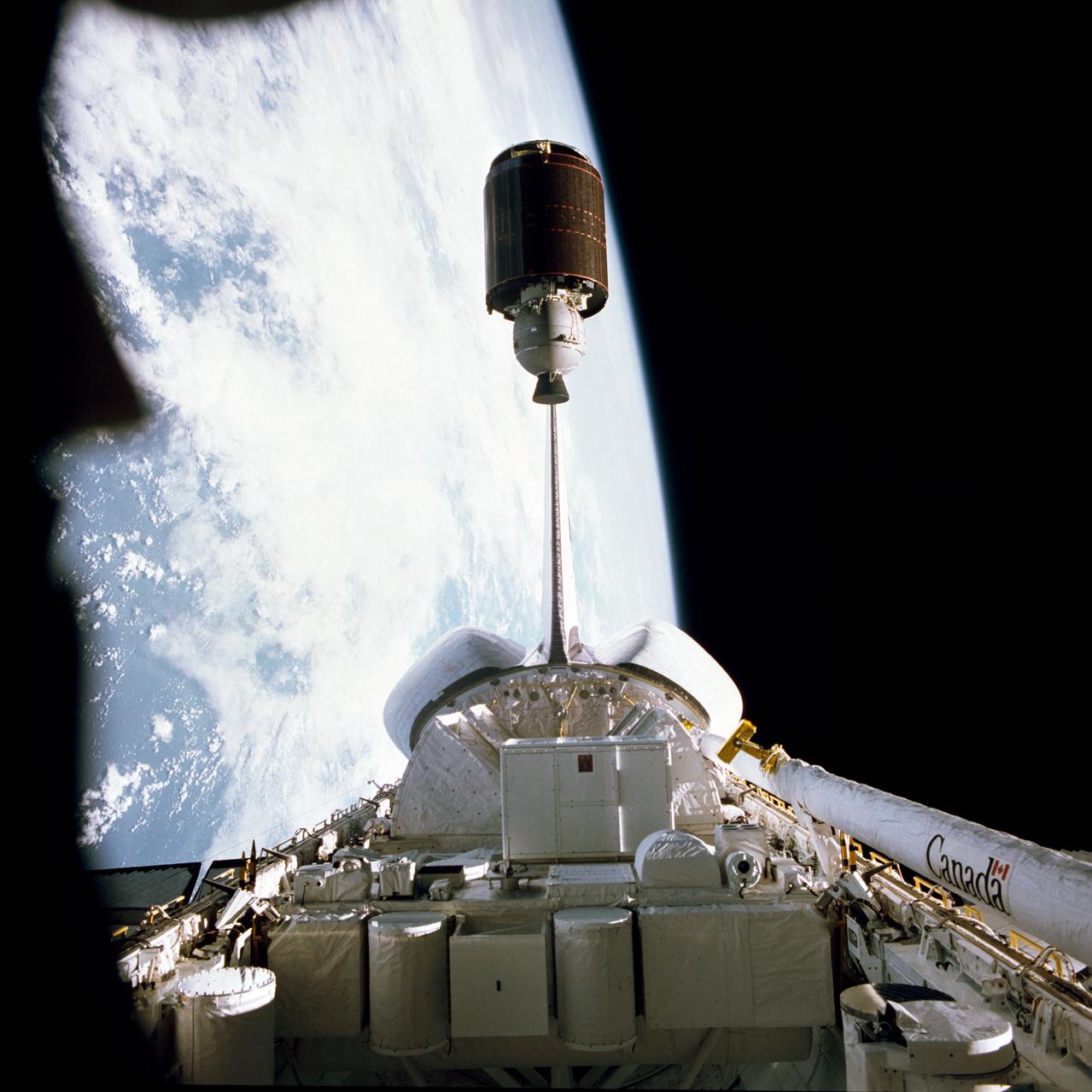
STS008-49-1724 (31 Aug 1983) --- The Indian National Satellite (INSAT) is about to clear the vertical stabilizer of the Earth-orbiting Space Shuttle Challenger and on its way to a higher orbit. The STS-8 mission's Payload Flight Test Article (PFTA) displays the U.S. flag in the middle of the cargo bay, as the Canadian built Remote Manipulator System (RMS) appears to be waiting for its busy agenda of activity with the barbell-shaped test device. This 70mm frame was exposed by a crewmember using a handheld Hasselblad inside Challenger's cabin.

STS095-E-5027 (10-29-98) Astronaut Pedro Duque, mission specialist representing the European Space Agency (ESA)looks over notes on the Discovery's aft flight deck during Flight Day 1 activities. At left frame are controls for the remote manipulator system (RMS) and part of the frame of one of the windows overlooking the cargo bay, where the Spartan 201 satellite is berthed. The photo was taken at 11:30:18 GMT, Oct. 29.

STS085-312-027 (7 - 19 August 1997) --- Astronaut N. Jan Davis, payload commander, is pictured at the work station for the Remote Manipulator System (RMS) on the aft flight deck of the Space Shuttle Discovery. Davis controlled and oversaw operations with the Cryogenic Infrared Spectrometers and Telescopes for the Atmosphere-Shuttle Pallet Satellite-2 (CRISTA-SPAS-2) during the 12-day mission in Earth-orbit.

STS046-01-019 (1 Aug 1992) --- Claude Nicollier, representing the European Space Agency (ESA) onboard the Space Shuttle Atlantis for the mission, is seen on the flight deck during pre-deployment operations with the ESA's EURECA satellite. EURECA can be seen on the end of the Remote Manipulator System (RMS). Nicollier was joined by five NASA astronauts and an Italian payload specialist for eight days aboard the Atlantis.
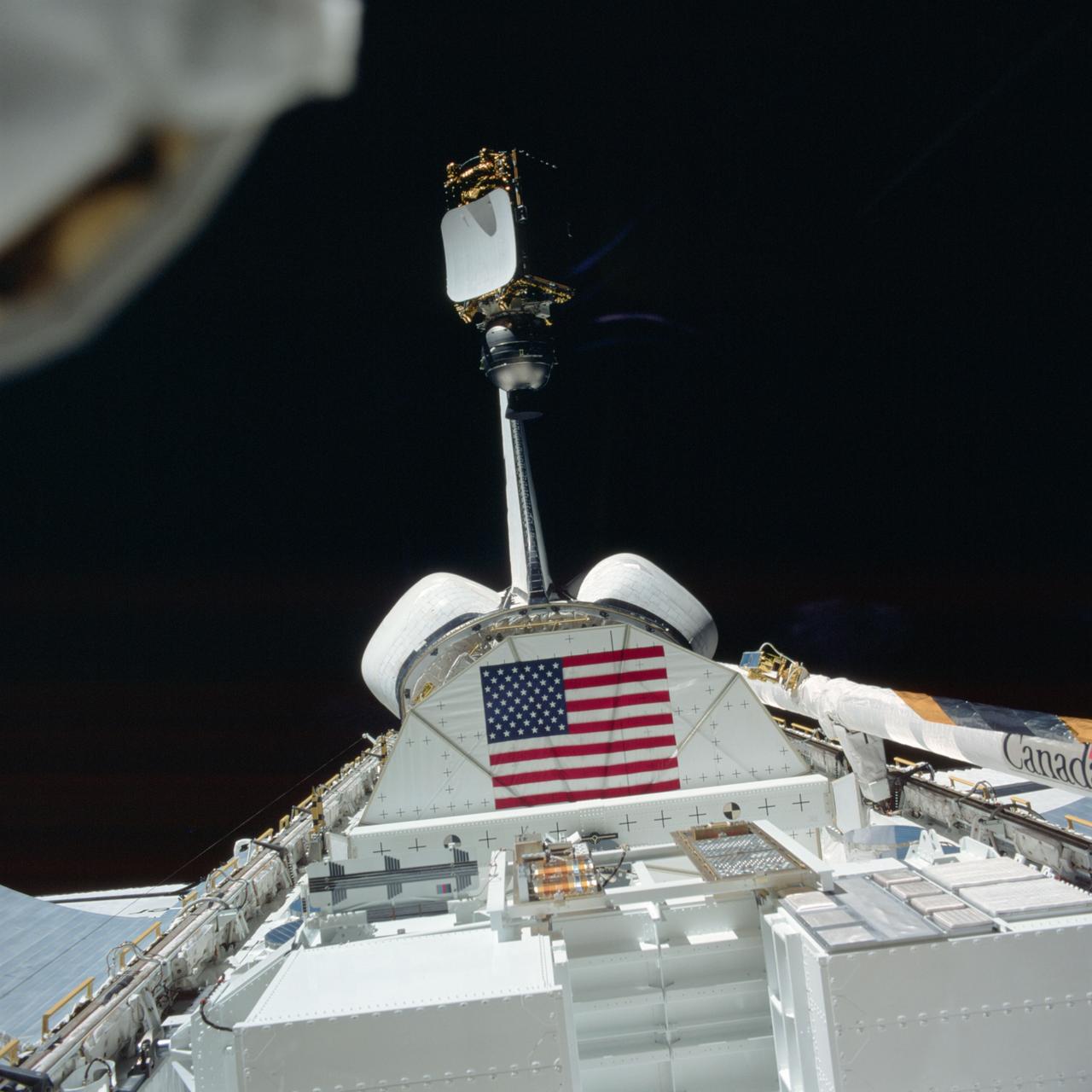
STS008-49-1722 (30 Aug-5 Sept 1983) --- The Indian National Satellite (INSAT) is about to clear the Earth-orbiting Space Shuttle Challenger this 70mm frame exposed with a handheld camera from the aft flight deck. The Payload Flight Test Article (PFTA) displays the United States flag in the middle of the cargo bay and the Canadian built Remote Manipulator System (RMS) appears to be waiting for its busy agenda of activity with the barbell-shaped test device.

STS039-19-015 (28 April- 6 May 1991) --- This STS-39 35mm scene shows the Strategic Defense Initiative Organization (SDIO) Shuttle Pallet Satellite (SPAS-II) on the end of the remote manipulator system (RMS) end effector. During the eight-day flight, SPAS collected data in both a free-flying mode and while attached to the RMS.

51I-44-012 (1 Sept. 1985) --- Astronaut James D. van Hoften looks on as the Syncom IVC-3 satellite responds to his push against it moments earlier. Dr. van Hoften, mission specialist, is anchored to a foot restraint on the end of the remote manipulator system (RMS) arm of the Earth-orbiting space shuttle Discovery. The 51-I crew members showed this photograph at their Sept. 11 postflight press conference. Photo credit: NASA

51A-39-040 (14 Nov. 1984) --- A 70mm frame of Westar VI retrieval. Astronauts Dale A. Gardner, left, and Joseph P. Allen IV work together with Anna L. Fisher (not pictured, controlling remote manipulator system (RMS) arm from Discovery?s cabin) to bring Westar VI/PAM-D into cargo bay. Allen is on the mobile foot restraint, which is attached to the RMS end effector, while Gardner works to remove a stinger device from the now stabilized satellite. Photo credit: NASA

STS072-726-085 (11-20 Jan. 1996) --- The crew members captured this 70mm view of the Space Shuttle Endeavour’s cargo bay, with the reflection of sunglint over Earth’s horizon. The Canadian-built Remote Manipulator System (RMS) arm, with two television cameras affixed, is at frame right. The crew earlier had retrieved the Japanese Space Flyer (SFU) and berthed in the aft cargo bay, along with the Office of Aeronautics and Space Technology (OAST) Flyer satellite.

STS087-357-019 (19 November - 5 December 1997) --- Astronaut Kalpana Chawla, mission specialist, operates Columbia's Remote Manipulator System (RMS) on the aft flight deck during operations with the Spartan 201 satellite. Chawla joined four other astronauts and a Ukrainian payload specialist for 16-days of research in Earth-orbit in support of the United States Microgravity Payload 4 (USMP-4) mission.

51A-39-034 (14 Nov. 1984) --- A 70mm frame of astronaut Dale A. Gardner, wearing the Manned Maneuvering Unit (MMU) approaching the spinning WESTAR VI satellite over Bahama Banks. The end effector of the Remote Manipulator System (RMS) controlled by Dr. Anna L. Fisher inside the space shuttle Discovery's cabin, awaits its duty at right. Gardner made a hard dock with the stinger at 6:32 a.m. (CST). Photo credit: NASA

STS095-E-5071 (1 Nov. 1998) --- Backdropped against the blackness of space and Earth's horizon, Spartan 201-05 leaves the cargo bay of the Space Shuttle Discovery. The satellite will remain a free-flyer for several days while it records data on the solar wind and the sun's corona. This data is hoped to increase knowledge of the sun's effect on our planet. The Canadian-built remote manipulator system (RMS)is partially visible in the frame. The photograph was taken with an electronic still camera (ESC) at 2:08:48 GMT, November 1.
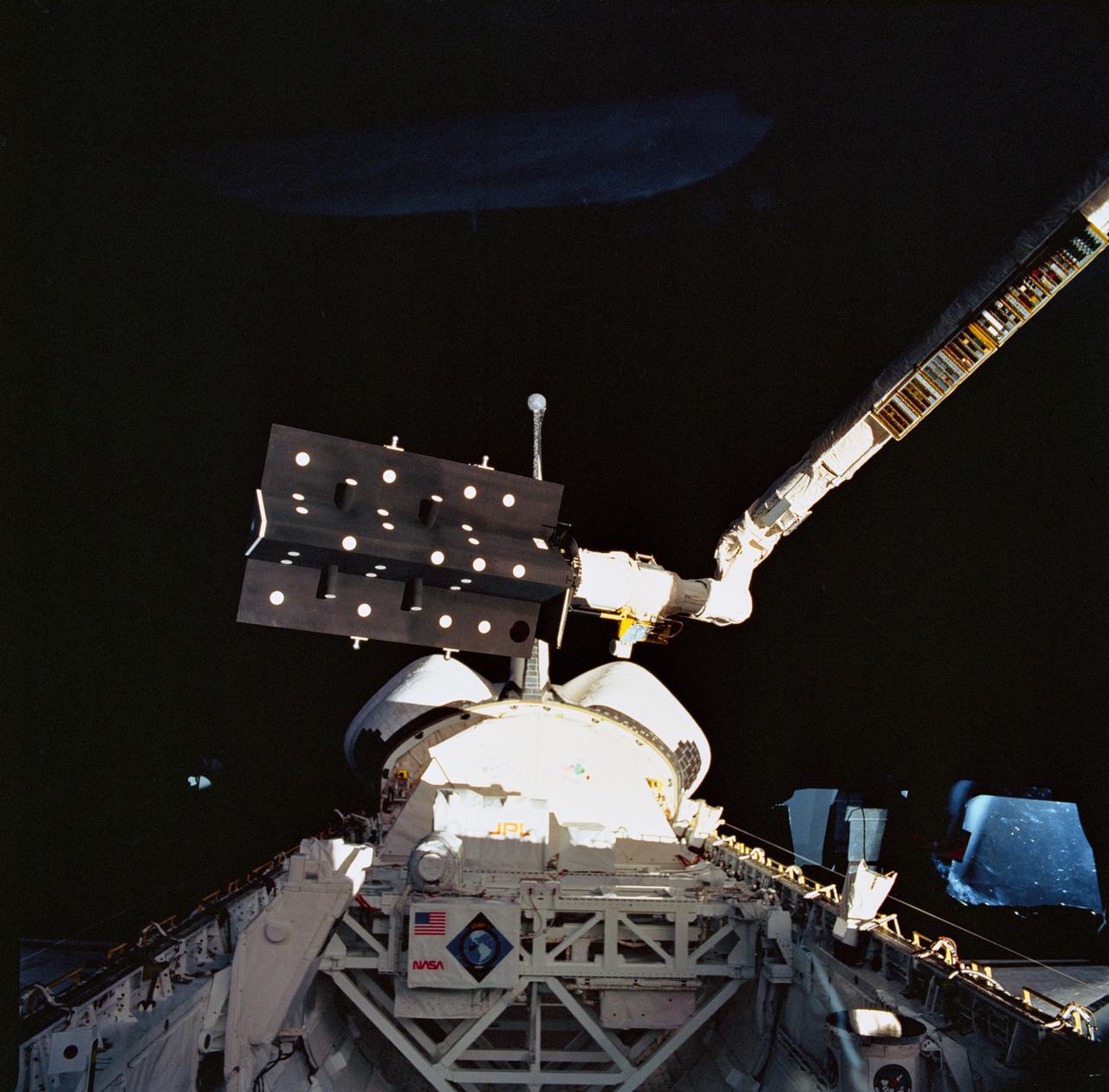
STS052-71-057 (22 Oct-1 Nov 1992) --- This 70mm frame, photographed with a handheld Hasselblad camera aimed through Columbia's aft flight deck windows, captures the operation of the Space Vision System (SVS) experiment above the cargo bay. Target dots have been placed on the Canadian Target Assembly (CTA), a small satellite, in the grasp of the Canadian-built remote manipulator system (RMS) arm. SVS utilized a Shuttle TV camera to monitor the dots strategically arranged on the satellite, to be tracked. As the satellite moved via the arm, the SVS computer measured the changing position of the dots and provided real-time television display of the location and orientation of the CTA. This type of displayed information is expected to help an operator guide the RMS or the Mobile Servicing System (MSS) of the future when berthing or deploying satellites. Also visible in the frame is the U.S. Microgravity Payload (USMP-01).

S77-E-5065 (21 May 1996) --- With a cloudy horizon scene as a backdrop, the Spartan 207 free-flyer is held in the grasp of the Space Shuttle Endeavour's Remote Manipulator System (RMS) following its re-capture on May 21, 1996. The view was captured with an onboard Electronic Still Camera (ESC). The six-member crew has spent a portion of the early stages of the mission in various activities involving the Spartan 207 and the related Inflatable Antenna Experiment (IAE). The Spartan project is managed by NASA's Goddard Space Flight Center (GSFC) for NASA's Office of Space Science, Washington, D.C.

STS064-74-052 (9-20 Sept. 1994) --- Astronauts onboard the space shuttle Discovery used a 70mm camera to capture this photograph of the retrieval operations with the Shuttle Pointed Autonomous Research Tool for Astronomy 201 (SPARTAN 201). A gibbous moon can be seen in the background. Photo credit: NASA or National Aeronautics and Space Administration

STS064-111-070 (9-20 Sept. 1994) --- The astronauts onboard the space shuttle Discovery used a 70mm camera to capture this view of the pre-deploy operations with the Shuttle Pointed Autonomous Research Tool for Astronomy (SPARTAN-201) 201. In the grasp of the robot arm device of the Remote Manipulator System (RMS), SPARTAN 201 hovers above Discovery's cargo bay prior to its two days of free-flight, some 40 miles away from the parent spacecraft. Photo credit: NASA or National Aeronautics and Space Administration

S77-E-5053 (21 May 1996) --- The Spartan 207 free-flyer is held in a low-hover mode above its berth in the Space Shuttle Endeavour's cargo bay in the grasp of the Remote Manipulator System (RMS). The Spacehab module can be seen in the foreground. The free-flyer was re-captured by the six crew members on May 21, 1996. The crew has spent a portion of the early stages of the mission in various activities involving the Spartan 207 and the related Inflatable Antenna Experiment (IAE). The Spartan project is managed by NASA's Goddard Space Flight Center (GSFC) for NASA's Office of Space Science, Washington, D.C.

S77-E-5064 (21 May 1996)--- In this medium close-up view, captured by an Electronic Still Camera (ESC), the Spartan 207 free-flyer is held in the grasp of the Space Shuttle Endeavour's Remote Manipulator System (RMS) following its re-capture on May 21, 1996. The six-member crew has spent a portion of the early stages of the mission in various activities involving the Spartan 207 and the related Inflatable Antenna Experiment (IAE). The Spartan project is managed by NASA's Goddard Space Flight Center (GSFC) for NASA's Office of Space Science, Washington, D.C.
51I-S-237 (1 Sept. 1985) --- A still photo made from a video downlink shows astronaut James D. van Hoften, just after giving a shove to the Syncom IV-3 communications satellite. NASA's 51-I astronaut crew aboard the space shuttle Discovery had earlier captured and repaired the previously errant satellite. Photo credit: NASA

S77-E-5052 (21 May 1996) --- The Spartan 207 free-flyer is held in a low-hover mode above its berth in the Space Shuttle Endeavour's cargo bay in the grasp of the Remote Manipulator System (RMS). The free-flyer was re-captured by the six crew members on May 21, 1996. The crew has spent a portion of the early stages of the mission in various activities involving the Spartan 207 and the related Inflatable Antenna Experiment (IAE). The Spartan project is managed by NASA's Goddard Space Flight Center (GSFC) for NASA's Office of Space Science, Washington, D.C.

51I-102-029 (31 August - 1 September 1985) --- This is one of a series of six photographs released by NASA covering the extravehicular activity (EVA) of astronauts James D. van Hoften and William F. Fisher, who helped to capture, repair and release the previously errant Syncom IV-3 communications satellite. Here, Dr. van Hoften has just given a shove to the the Syncom. (For orientation, moon should be in lower right quadrant).

51I-102-033 (31 August - 1 September 1985) --- This is one of a series of six photographs released by NASA covering the extravehicular activity (EVA) of astronauts James D. van Hoften and William F. Fisher, who helped to capture, repair and release the previously errant Syncom IV-3 communications satellite. Here, Dr. van Hoften has just given a shove to the the Syncom. (For orientation, moon should be in lower right quadrant).
STS052-80-030 (23 Oct 1992) --- One of a series of three views of the deployment of the Laser Geodynamic Satellite (LAGEOS). The photograph was taken with a 70mm handheld camera aimed through the aft flight deck windows of the Earth-orbiting Space Shuttle Columbia. A crew of five NASA astronauts and a Canadian payload specialist spent ten days aboard Columbia for the STS-52 mission.
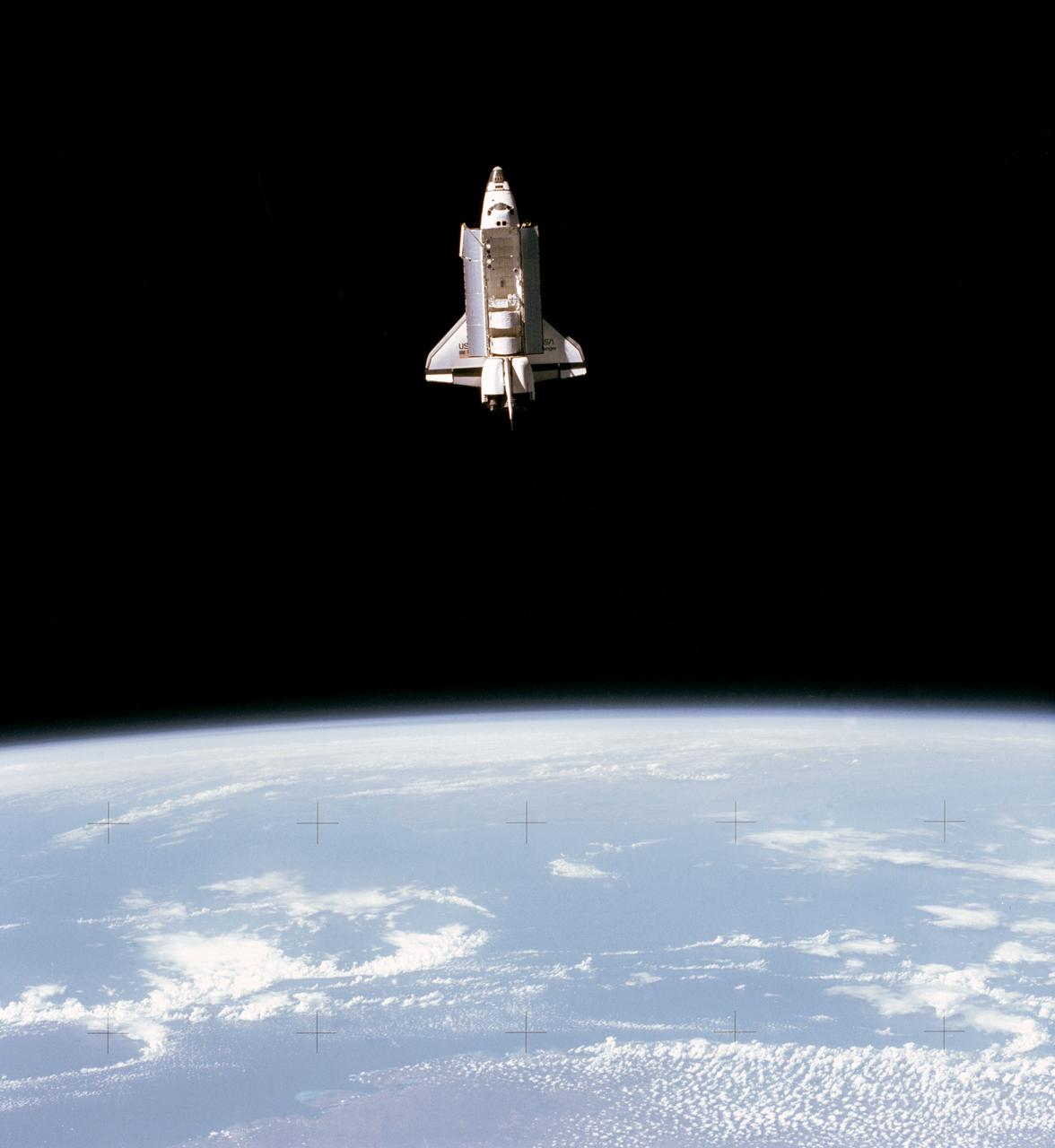
S83-35803 (22 June 1983) --- The Earth-orbiting space shuttle Challenger against the blackness of space was captured by a 70mm camera onboard the temporarily free-flying Shuttle Pallet Satellite (SPAS-01) during a busy Day 5 on the STS-7 mission. Visible in the cargo bay are the protective cradles for the now vacated Telesat Anik C2 and Palapa B communications satellites, the pallet for the NASA Office of Space and Terrestrial Applications (OSTA-2); the Remote Manipulator System (RMS) and the KU-Band antenna. The STS-7 astronaut crew with the RMS arm later retrieved the SPAS and returned it to a stowed position in the cargo bay for the return to Earth. Photo credit: NASA

iss050e056301 (3/8/2017) --- A view of the Space Station Remote Manipulator System (SSRMS) during Robotic Refueling Mission-Phase 2 (RRM-P2) operations. NASA's Robotic Refueling Mission (RRM) is an external International Space Station (ISS) investigation that demonstrates and tests the tools, technologies and techniques needed to robotically refuel, repair, and upgrade satellites in space, especially satellites that were not designed to be serviced. A joint effort between NASA and the Canadian Space Agency (CSA), RRM is the first in-orbit attempt to test robotic refueling and servicing techniques for spacecraft not built with in-orbit servicing in mind.
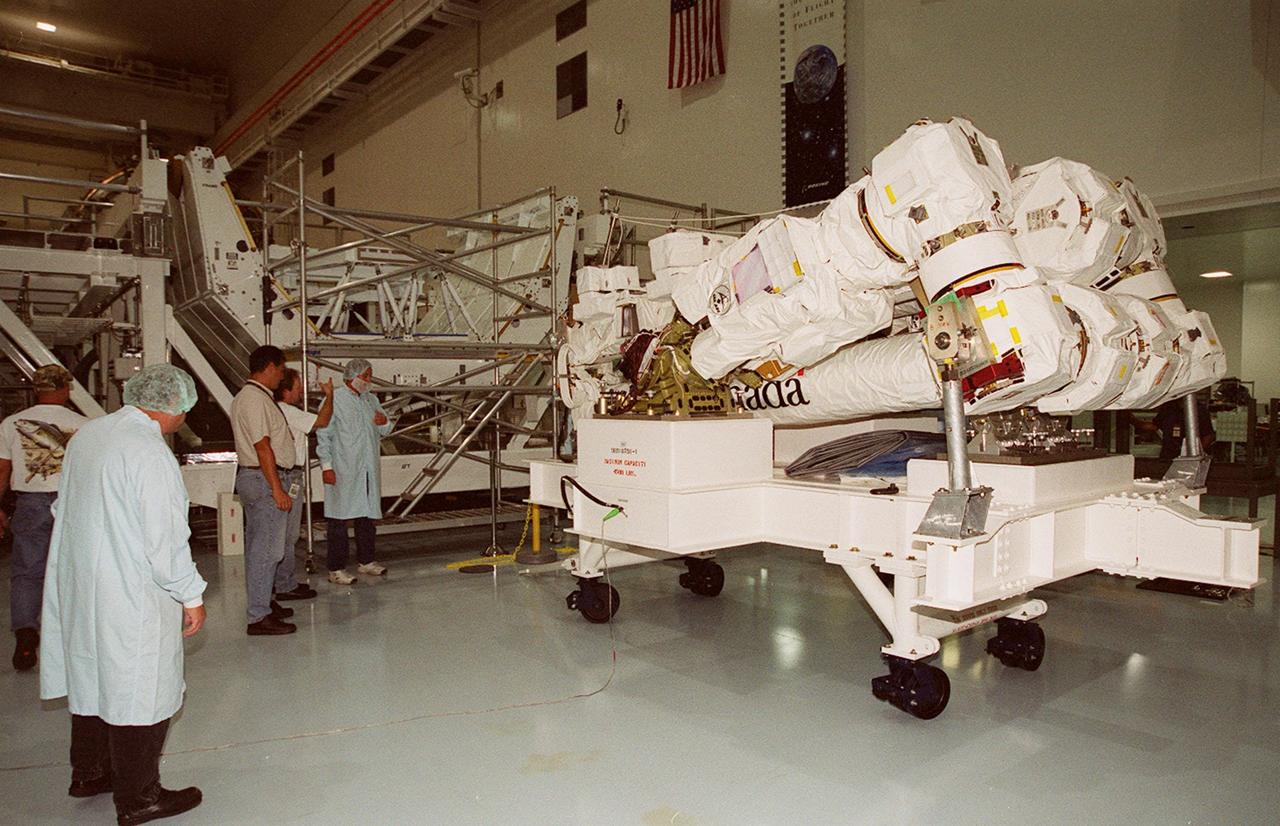
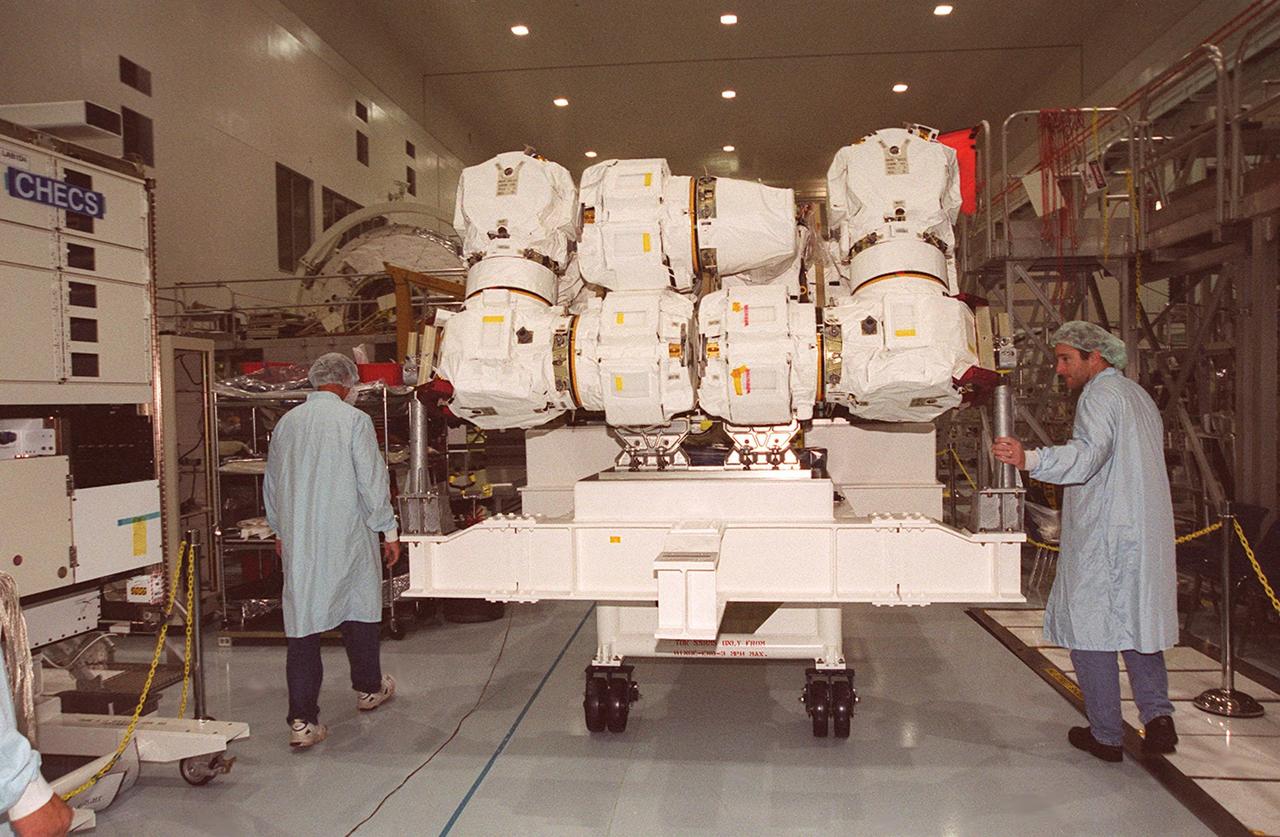
The Space Station Remote Manipulator System (SSRMS), also known as the “Canadian arm,” (at right) arrives at a pallet in the Space Station Processing Facility where it will undergo testing once in place. The SSRMS is part of Canada’s Mobile Servicing System, an essential component of the International Space Station. This robotic system will play a key role in Space Station assembly and maintenance, moving equipment and supplies around the Station, releasing and capturing satellites, supporting astronauts working in space and servicing instruments and other payloads attached to the Space Station. SSRMS will be on Shuttle mission STS-100, flight 6A, to the Space Station, scheduled for launch April 19, 2001
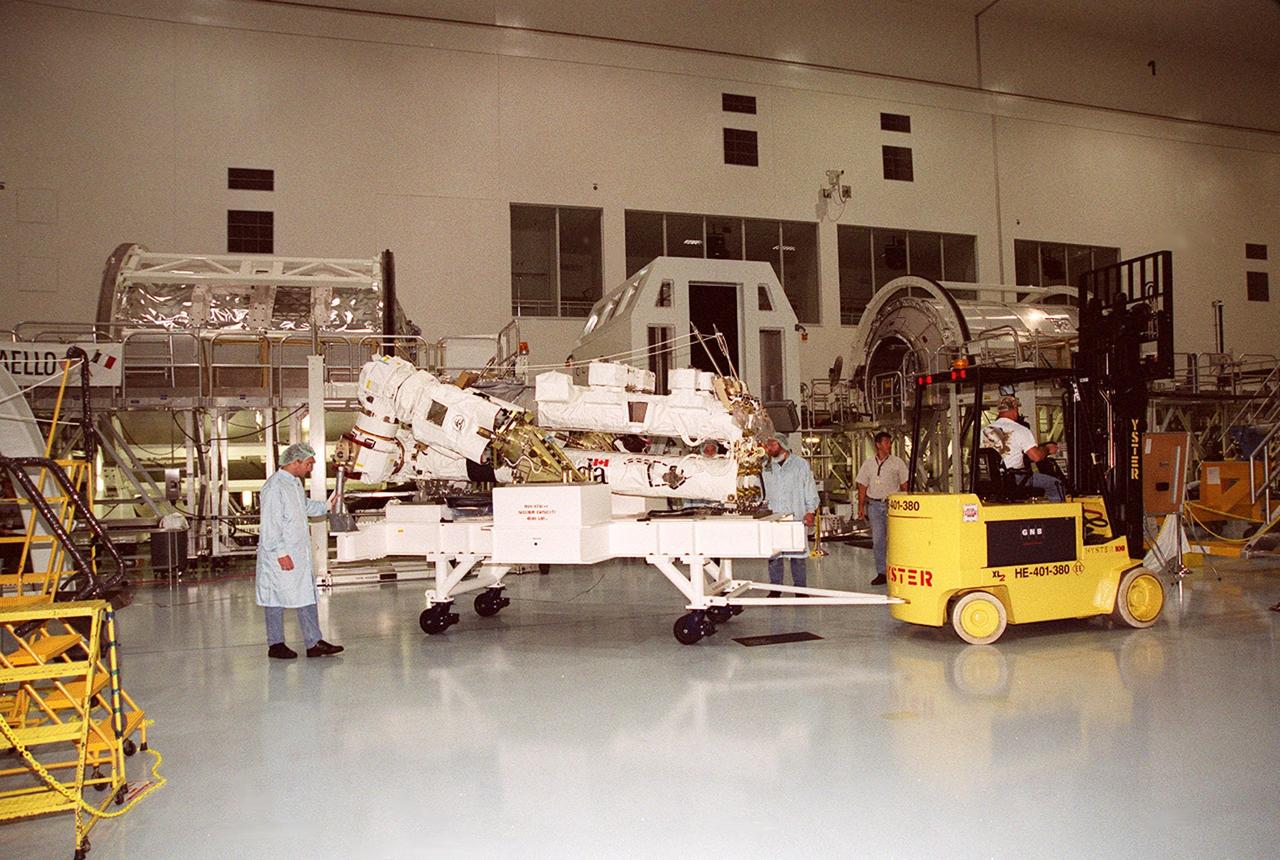
Workers in the Space Station Processing Facility move the Space Station Remote Manipulator System (SSRMS), also known as the “Canadian arm,” to a pallet for testing. The SSRMS is part of Canada’s Mobile Servicing System, an essential component of the International Space Station. This robotic system will play a key role in Space Station assembly and maintenance, moving equipment and supplies around the Station, releasing and capturing satellites, supporting astronauts working in space and servicing instruments and other payloads attached to the Space Station. SSRMS will be on Shuttle mission STS-100, flight 6A, to the Space Station, scheduled for launch April 19, 2001
Workers in the Space Station Processing Facility move the Space Station Remote Manipulator System (SSRMS), also known as the “Canadian arm,” to a pallet for testing. The SSRMS is part of Canada’s Mobile Servicing System, an essential component of the International Space Station. This robotic system will play a key role in Space Station assembly and maintenance, moving equipment and supplies around the Station, releasing and capturing satellites, supporting astronauts working in space and servicing instruments and other payloads attached to the Space Station. SSRMS will be on Shuttle mission STS-100, flight 6A, to the Space Station, scheduled for launch April 19, 2001

Launched April 6, 1984, one of the goals of the STS-41C mission was to repair the damaged free-flying Solar Maximum Mission Satellite (SMMS), or Solar Max. The original plan was to make an excursion out to the SMMS and capture it for necessary repairs. Pictured is Mission Specialist George Nelson approaching the damaged satellite in a capture attempt. This attempted feat was unsuccessful. It was necessary to capture the satellite via the orbiter's Remote Manipulator System (RMS) and secure it into the cargo bay in order to perform the repairs, which included replacing the altitude control system and the coronograph/polarimeter electronics box. The SMMS was originally launched into space via the Delta Rocket in February 1980, with the purpose to provide a means of studying solar flares during the most active part of the current sunspot cycle. Dr. Einar Tandberg-Hanssen of Marshall Space Flight Center's Space Sciences Lab was principal investigator for the Ultraviolet Spectrometer and Polarimeter, one of the seven experiments of the Solar Max.

CAPE CANAVERAL, Fla. --- In Orbiter Processing Facility Bay 3 at NASA's Kennedy Space Center, space shuttle Discovery's payload bay doors are closing. Seen at center is a Ku-band antenna that can be used on orbit to transmit and receive information from the ground through the Tracking and Data Relay Satellite system. Discovery is the designated vehicle on the STS-124 mission to the International Space Station. On the mission, the shuttle will transport the Kibo Japanese Experiment Module - Pressurized Module and the Japanese Remote Manipulator System. The payload will be installed at the launch pad. Launch is targeted for May 25. Photo credit: NASA/Chris Rhodes
41C-37-1715 (11 April 1984) --- A scenic panorama is captured by an onboard 70mm handheld camera during the April 11, 1984, Solar Maximum Mission Satellite (SMMS) repair job aboard the Earth-orbiting Space Shuttle Challenger. The SMMS is temporarily docked at the Challenger's Flight Support System (FSS) so that astronauts George D. Nelson and James D. van Hoften could perform a series of repair tasks. The Remote Manipulator System (RMS) arm was used to move the astronauts into position for their series of chores. Note the gibbous Moon to the right of center and the horizon of the blue and white Earth in the lower right quadrant.

51D-44-046 (17 April 1985) --- The Space Shuttle Discovery's Remote Manipulator System (RMS) arm and two specially designed extensions move toward the troubled Syncom-IV (LEASAT) communications satellite during a station keeping mode of the two spacecraft in Earth orbit. Inside the Shuttle's cabin, astronaut Rhea Seddon, 51D mission specialist, controlled the Canadian-built arm in an attempt to move an external lever on the satellite. Crewmembers learned of the satellite's problems shortly after it was deployed from the cargo bay on April 13, 1985. The arm achieved physical contact with the lever as planned. However, the satellite did not respond to the contact as hoped. A 70mm handheld Hassellblad camera, aimed through Discovery's windows, recorded this frame -- one of the first to be released to news media following return of the seven-member crew on April 17, 1985.
S84-27022 (7 Feb 1984) --- A 35mm frame from the February 7, 1984, extravehicular activity (EVA) photographed with a camera affixed to the gear of astronaut Bruce McCandless II. The mission specialist was equipped with the nitrogen-propelled, hand-controlled Manned Maneuvering Unit (MMU), which took him some 90 meters away from the Space Shuttle Challenger. This scene is reminiscent of views of the Challenger during the June 1983, STS-7 flight, on which the Shuttle Pallet Satellite (SPAS - seen here in the middle of the cargo bay) provided scenes of 38-meter-long reusable vehicle over the Earth.

The crew patch of STS-72 depicts the Space Shuttle Endeavour and some of the payloads on the flight. The Japanese satellite, Space Flyer Unit (SFU) is shown in a free-flying configuration with the solar array panels deployed. The inner gold border of the patch represents the SFU's distinct octagonal shape. Endeavour’s rendezvous with and retrieval of SFU at an altitude of approximately 250 nautical miles. The Office of Aeronautics and Space Technology's (OAST) flyer satellite is shown just after release from the Remote Manipulator System (RMS). The OAST satellite was deployed at an altitude of 165 nautical miles. The payload bay contains equipment for the secondary payloads - the Shuttle Laser Altimeter (SLA) and the Shuttle Solar Backscatter Ultraviolet Instrument (SSBUV). There were two space walks planned to test hardware for assembly of the International Space Station. The stars represent the hometowns of the crew members in the United States and Japan.

The STS-52 insignia, designed by the mission’s crew members, features a large gold star to symbolize the crew's mission on the frontiers of space. A gold star is often used to symbolize the frontier period of the American West. The red star in the shape of the Greek letter lambda represents both the laser measurements taken from the Laser Geodynamic Satellite (LAGEOS II) and the Lambda Point Experiment, which was part of the United States Microgravity Payload (USMP-l). The remote manipulator and maple leaf are emblematic of the Canadian payload specialist who conducted a series of Canadian flight experiments (CANEX-2), including the Space Vision System test.

This STS-48 onboard photo is of the Upper Atmosphere Research Satellite (UARS) in the grasp of the RMS (Remote Manipulator System) during deployment, September 1991. UARS gathers data related to the chemistry, dynamics, and energy of the ozone layer. UARS data is used to study energy input, stratospheric photo chemistry, and upper atmospheric circulation. UARS helps us understand and predict how the nitrogen and chlorine cycles, and the nitrous oxides and halo carbons which maintain them, relate to the ozone balance. It also observes diurnal variations in short-lived stratospheric chemical species important to ozone destruction. Data from UARS enables scientists to study ozone depletion in the upper atmosphere.

CAPE CANAVERAL, Fla. – In Orbiter Processing Facility bay 3 at NASA's Kennedy Space Center in Florida, the remote manipulator system, or RMS, arm is lifted out of space shuttle Discovery's payload bay. The RMS is used to grab, or grapple, the payload as well as retrieve, repair and deploy satellites; provide a mobile extension ladder for spacewalking crewmembers; and be used as an inspection aid to allow flight crew members to view the orbiter’s or payload’s surfaces through a TV camera on the arm. Discovery is targeted to launch Aug. 6 on the STS-128 mission. Photo credit: NASA/Jack Pfaller

CAPE CANAVERAL, Fla. – In Orbiter Processing Facility bay 3 at NASA's Kennedy Space Center in Florida, technicians prepare to remove the remote manipulator system, or RMS, arm in the payload bay of space shuttle Discovery. The RMS is used to grab, or grapple, the payload as well as retrieve, repair and deploy satellites; provide a mobile extension ladder for spacewalking crewmembers; and be used as an inspection aid to allow flight crew members to view the orbiter’s or payload’s surfaces through a TV camera on the arm. Discovery is targeted to launch Aug. 6 on the STS-128 mission. Photo credit: NASA/Jack Pfaller

This STS-48 onboard photo is of the Upper Atmosphere Research Satellite (UARS) in the grasp of the RMS (Remote Manipulator System) during deployment, September 1991. UARS gathers data related to the chemistry, dynamics, and energy of the ozone layer. UARS data is used to study energy input, stratospheric photo chemistry, and upper atmospheric circulation. UARS helps us understand and predict how the nitrogen and chlorine cycles, and the nitrous oxides and halo carbons which maintain them, relate to the ozone balance. It also observes diurnal variations in short-lived stratospheric chemical species important to ozone destruction. Data from UARS enables scientists to study ozone depletion in the upper atmosphere.

CAPE CANAVERAL, Fla. – In Orbiter Processing Facility bay 3 at NASA's Kennedy Space Center in Florida, the remote manipulator system, or RMS, arm is lifted away from the payload bay of space shuttle Discovery. The RMS is used to grab, or grapple, the payload as well as retrieve, repair and deploy satellites; provide a mobile extension ladder for spacewalking crewmembers; and be used as an inspection aid to allow flight crew members to view the orbiter’s or payload’s surfaces through a TV camera on the arm. Discovery is targeted to launch Aug. 6 on the STS-128 mission. Photo credit: NASA/Jack Pfaller

STS077-711-054 (21 May 1996) --- The Spartan 207 free flyer is held in the grasp of the Remote Manipulator System (RMS). As photographed through an overhead window on the Space Shuttle Endeavour?s aft flight deck, the satellite is backdropped against a heavily sunglinted horizon over the Middle East. The Spartan was re-captured by the six crew members on May 21, 1996 following a period of free-flight. The Endeavour crew spent a portion of the flight time in various activities involving the Spartan 207 and the related Inflatable Antenna Experiment (IAE). The Spartan project is managed by NASA?s Goddard Space Flight Center for NASA?s Office of Space Science, Washington, D.C.

CAPE CANAVERAL, Fla. – In Orbiter Processing Facility bay 3 at NASA's Kennedy Space Center in Florida, the remote manipulator system, or RMS, removed from space shuttle Discovery is lowered toward a storage platform. The RMS is used to grab, or grapple, the payload as well as retrieve, repair and deploy satellites; provide a mobile extension ladder for spacewalking crewmembers; and be used as an inspection aid to allow flight crew members to view the orbiter’s or payload’s surfaces through a TV camera on the arm. Discovery is targeted to launch Aug. 6 on the STS-128 mission. Photo credit: NASA/Jack Pfaller

During STS-56, the Shuttle Pointed Autonomous Research Tool for Astronomy 201 (SPARTAN-201), a freeflying payload, was captured on 70mm film as it drifts over the Red Sea coast of Sudan. SPARTAN-201 was photographed by the crewmembers aboard Discovery, Orbiter Vehicle (OV) 103. On the mission's third day, crewmembers used the remote manipulator system (RMS) to lift the satellite from its support structure in OV-103's payload bay (PLB) and release it into space. SPARTAN-201 was later recaptured by OV-103's RMS and returned to Earth with the astronaut crew. The cape structure in the background is Ras abu Shagara, north of Port Sudan.

STS095-E-5077 (1 Nov. 1998) --- Backdropped against the blackness of space and Earth's horizon, Spartan 201-05 leaves the cargo bay of the Space Shuttle Discovery. The satellite will remain a free-flyer for several days while it records data on the solar wind and the sun's corona. This data is hoped to increase knowledge of the sun's effect on our planet. Cargo bay of Discovery is partially visible at left. The Canadian-built remote manipulator system (RMS)is partially visible at right. The photograph was taken with an electronic still camera (ESC) at 2:09:35 GMT, November 1.

S84-40162 (21 Aug. 1984) --- Astronaut Anna L. Fisher controls the Remote Manipulator System (RMS) arm from inside the "orbiter" as part of her training program in the Johnson Space Center's Shuttle Mock-up and Integration Laboratory. Dr. Fisher, one of three mission specialists for mission 51-A, is inside the cabin portion of a trainer called the Manipulatory Development Facility (MDF). She is able to operate the arm in conjunction with an air bearing floor and to log a great deal of rehearsal time for her flight, on which the retrieval of a low-orbiting communications satellite is planned. Photo credit: NASA